Online Localisation and Colored Mesh Reconstruction Architecture for 3D Visual Feedback in Robotic Exploration Missions
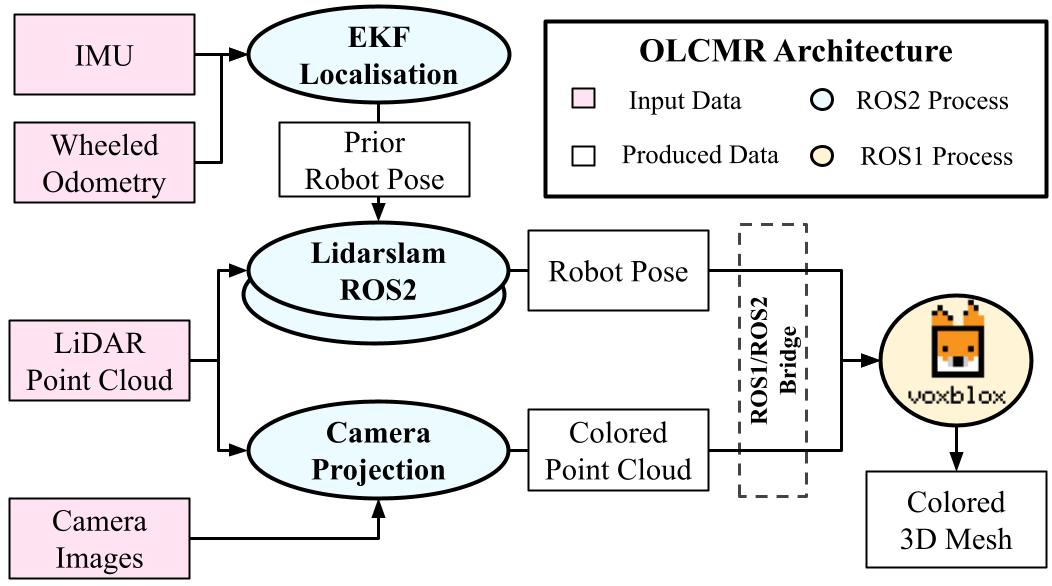
This paper introduces an Online Localisation and Colored Mesh Reconstruction (OLCMR) ROS perception architecture for ground exploration robots aiming to perform robust Simultaneous Localisation And Mapping (SLAM) in challenging unknown environments and provide an associated colored 3D mesh representation in real time. It is intended to be used by a remote human operator to easily visualise the mapped environment during or after the mission or as a development base for further researches in the field of exploration robotics. The architecture is mainly composed of carefully-selected open-source ROS implementations of a LiDAR-based SLAM algorithm alongside a colored surface reconstruction procedure using a point cloud and RGB camera images projected into the 3D space. The overall performances are evaluated on the Newer College handheld LiDAR-Vision reference dataset and on two experimental trajectories gathered on board of representative wheeled robots in respectively urban and countryside outdoor environments. Index Terms: Field Robots, Mapping, SLAM, Colored Surface Reconstruction
PDF Abstract
 KITTI
KITTI
 Newer College
Newer College
