OSOP: A Multi-Stage One Shot Object Pose Estimation Framework
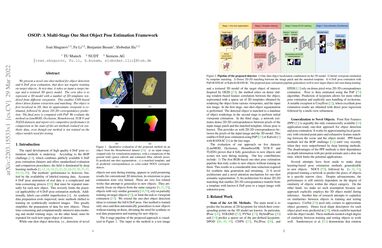
We present a novel one-shot method for object detection and 6 DoF pose estimation, that does not require training on target objects. At test time, it takes as input a target image and a textured 3D query model. The core idea is to represent a 3D model with a number of 2D templates rendered from different viewpoints. This enables CNN-based direct dense feature extraction and matching. The object is first localized in 2D, then its approximate viewpoint is estimated, followed by dense 2D-3D correspondence prediction. The final pose is computed with PnP. We evaluate the method on LineMOD, Occlusion, Homebrewed, YCB-V and TLESS datasets and report very competitive performance in comparison to the state-of-the-art methods trained on synthetic data, even though our method is not trained on the object models used for testing.
PDF Abstract CVPR 2022 PDF CVPR 2022 Abstract


 ssd
ssd
