ParticleSfM: Exploiting Dense Point Trajectories for Localizing Moving Cameras in the Wild
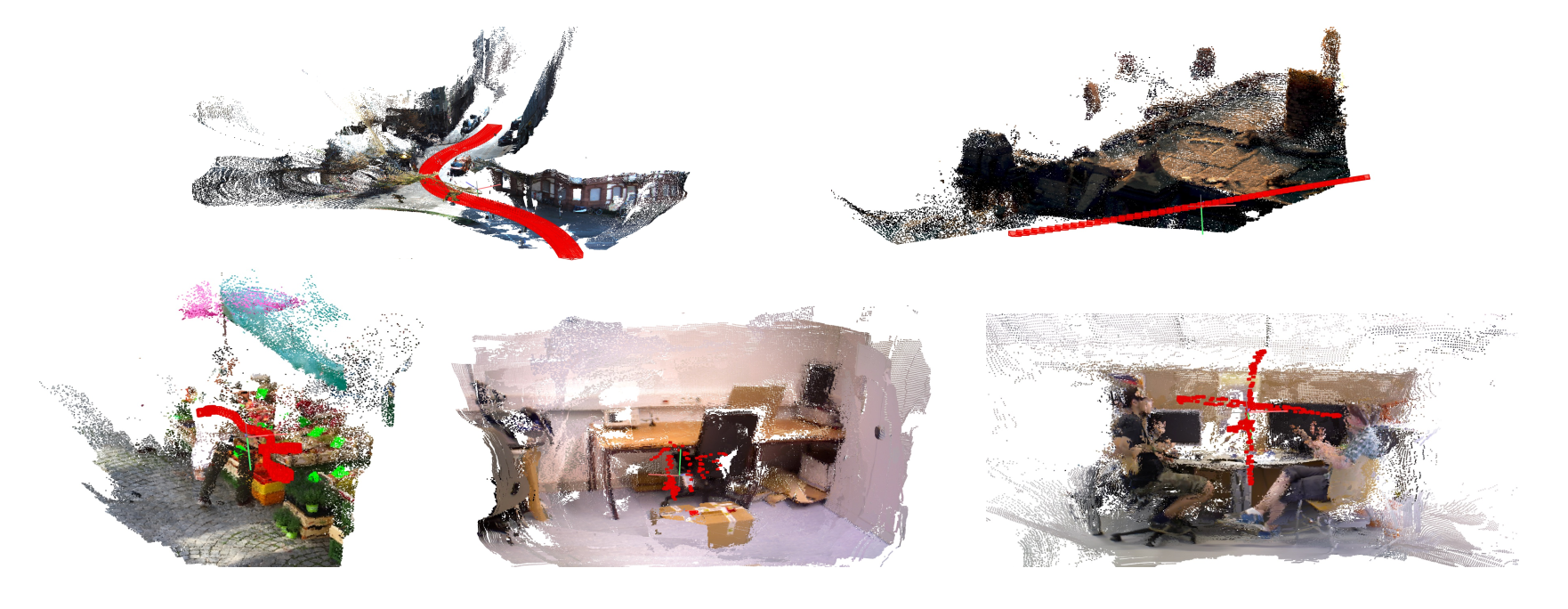
Estimating the pose of a moving camera from monocular video is a challenging problem, especially due to the presence of moving objects in dynamic environments, where the performance of existing camera pose estimation methods are susceptible to pixels that are not geometrically consistent. To tackle this challenge, we present a robust dense indirect structure-from-motion method for videos that is based on dense correspondence initialized from pairwise optical flow. Our key idea is to optimize long-range video correspondence as dense point trajectories and use it to learn robust estimation of motion segmentation. A novel neural network architecture is proposed for processing irregular point trajectory data. Camera poses are then estimated and optimized with global bundle adjustment over the portion of long-range point trajectories that are classified as static. Experiments on MPI Sintel dataset show that our system produces significantly more accurate camera trajectories compared to existing state-of-the-art methods. In addition, our method is able to retain reasonable accuracy of camera poses on fully static scenes, which consistently outperforms strong state-of-the-art dense correspondence based methods with end-to-end deep learning, demonstrating the potential of dense indirect methods based on optical flow and point trajectories. As the point trajectory representation is general, we further present results and comparisons on in-the-wild monocular videos with complex motion of dynamic objects. Code is available at https://github.com/bytedance/particle-sfm.
PDF Abstract



 ScanNet
ScanNet
 DAVIS
DAVIS
 FlyingThings3D
FlyingThings3D
 MPI Sintel
MPI Sintel
