PETR: Position Embedding Transformation for Multi-View 3D Object Detection
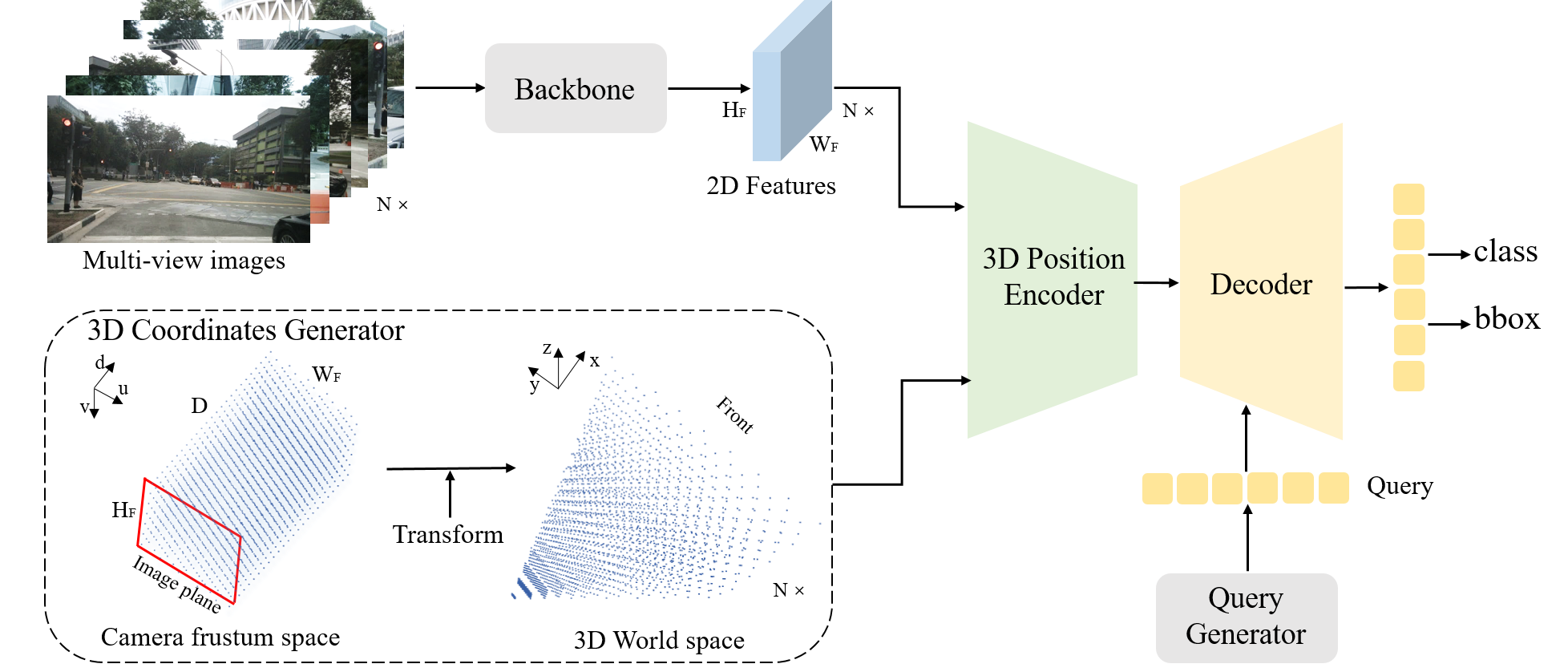
In this paper, we develop position embedding transformation (PETR) for multi-view 3D object detection. PETR encodes the position information of 3D coordinates into image features, producing the 3D position-aware features. Object query can perceive the 3D position-aware features and perform end-to-end object detection. PETR achieves state-of-the-art performance (50.4% NDS and 44.1% mAP) on standard nuScenes dataset and ranks 1st place on the benchmark. It can serve as a simple yet strong baseline for future research. Code is available at \url{https://github.com/megvii-research/PETR}.
PDF AbstractCode




Datasets
 nuScenes
nuScenes
Results from the Paper

Methods
No methods listed for this paper. Add
relevant methods here
