PointSIFT: A SIFT-like Network Module for 3D Point Cloud Semantic Segmentation
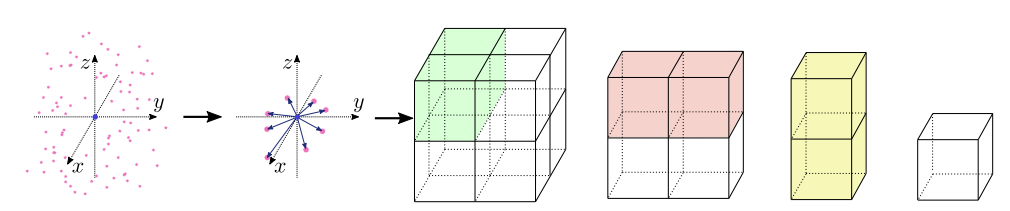
Recently, 3D understanding research sheds light on extracting features from point cloud directly, which requires effective shape pattern description of point clouds. Inspired by the outstanding 2D shape descriptor SIFT, we design a module called PointSIFT that encodes information of different orientations and is adaptive to scale of shape. Specifically, an orientation-encoding unit is designed to describe eight crucial orientations, and multi-scale representation is achieved by stacking several orientation-encoding units. PointSIFT module can be integrated into various PointNet-based architecture to improve the representation ability. Extensive experiments show our PointSIFT-based framework outperforms state-of-the-art method on standard benchmark datasets. The code and trained model will be published accompanied by this paper.
PDF Abstract


 ScanNet
ScanNet
 S3DIS
S3DIS
