Pose-guided Feature Disentangling for Occluded Person Re-identification Based on Transformer
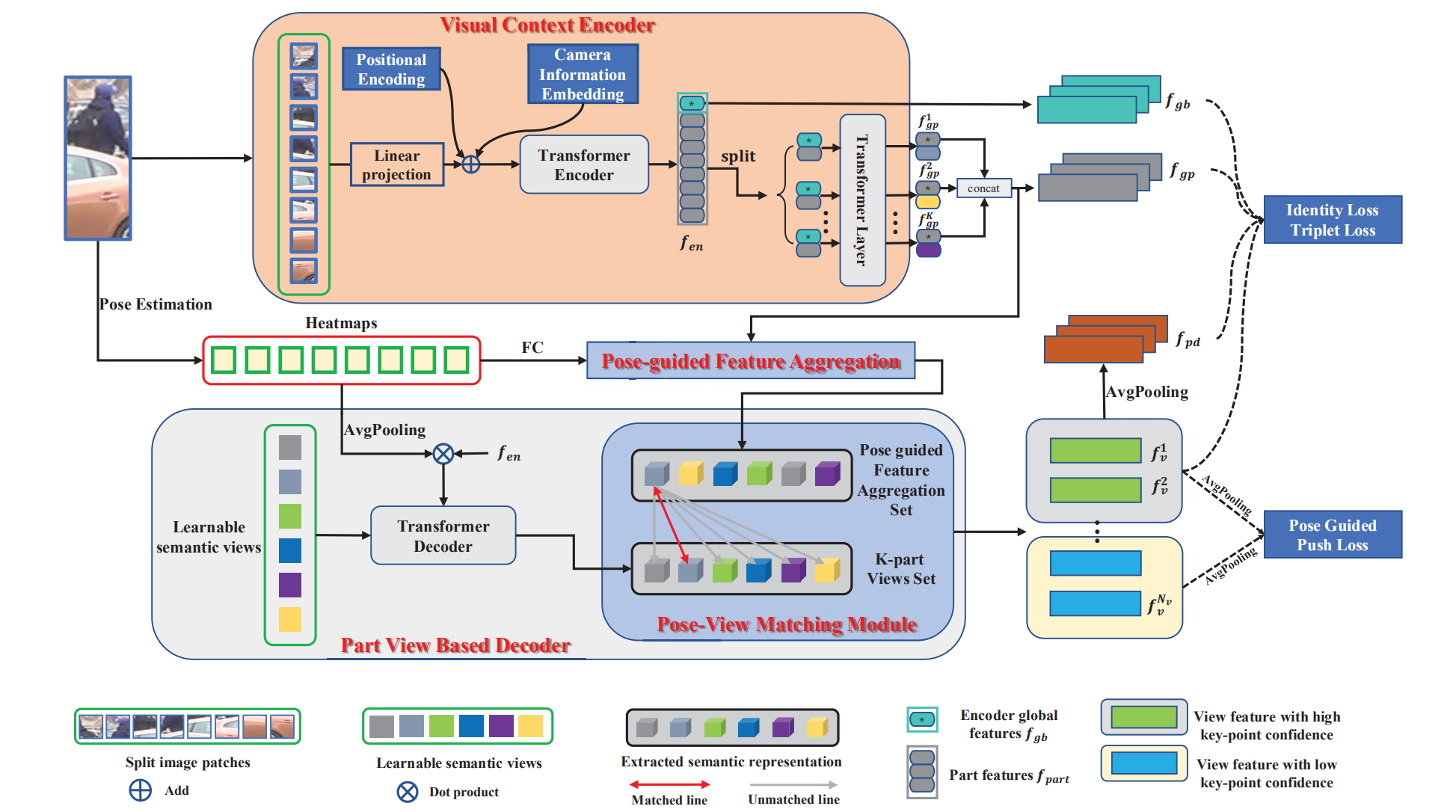
Occluded person re-identification is a challenging task as human body parts could be occluded by some obstacles (e.g. trees, cars, and pedestrians) in certain scenes. Some existing pose-guided methods solve this problem by aligning body parts according to graph matching, but these graph-based methods are not intuitive and complicated. Therefore, we propose a transformer-based Pose-guided Feature Disentangling (PFD) method by utilizing pose information to clearly disentangle semantic components (e.g. human body or joint parts) and selectively match non-occluded parts correspondingly. First, Vision Transformer (ViT) is used to extract the patch features with its strong capability. Second, to preliminarily disentangle the pose information from patch information, the matching and distributing mechanism is leveraged in Pose-guided Feature Aggregation (PFA) module. Third, a set of learnable semantic views are introduced in transformer decoder to implicitly enhance the disentangled body part features. However, those semantic views are not guaranteed to be related to the body without additional supervision. Therefore, Pose-View Matching (PVM) module is proposed to explicitly match visible body parts and automatically separate occlusion features. Fourth, to better prevent the interference of occlusions, we design a Pose-guided Push Loss to emphasize the features of visible body parts. Extensive experiments over five challenging datasets for two tasks (occluded and holistic Re-ID) demonstrate that our proposed PFD is superior promising, which performs favorably against state-of-the-art methods. Code is available at https://github.com/WangTaoAs/PFD_Net
PDF Abstract

 Market-1501
Market-1501
 Occluded REID
Occluded REID
