Precise Detection in Densely Packed Scenes
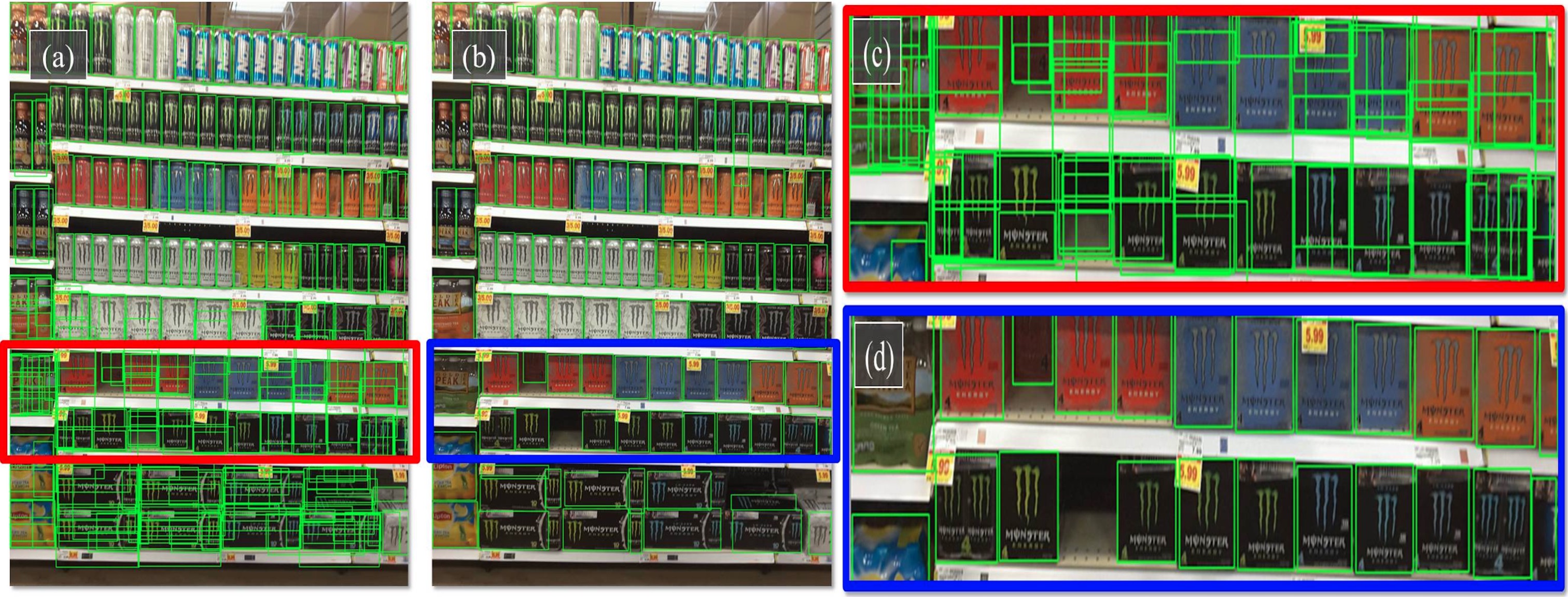
Man-made scenes can be densely packed, containing numerous objects, often identical, positioned in close proximity. We show that precise object detection in such scenes remains a challenging frontier even for state-of-the-art object detectors. We propose a novel, deep-learning based method for precise object detection, designed for such challenging settings. Our contributions include: (1) A layer for estimating the Jaccard index as a detection quality score; (2) a novel EM merging unit, which uses our quality scores to resolve detection overlap ambiguities; finally, (3) an extensive, annotated data set, SKU-110K, representing packed retail environments, released for training and testing under such extreme settings. Detection tests on SKU-110K and counting tests on the CARPK and PUCPR+ show our method to outperform existing state-of-the-art with substantial margins. The code and data will be made available on \url{www.github.com/eg4000/SKU110K_CVPR19}.
PDF Abstract CVPR 2019 PDF CVPR 2019 Abstract



 SKU110K
SKU110K
 CARPK
CARPK

