Probabilistic Symmetry for Multi-Agent Dynamics
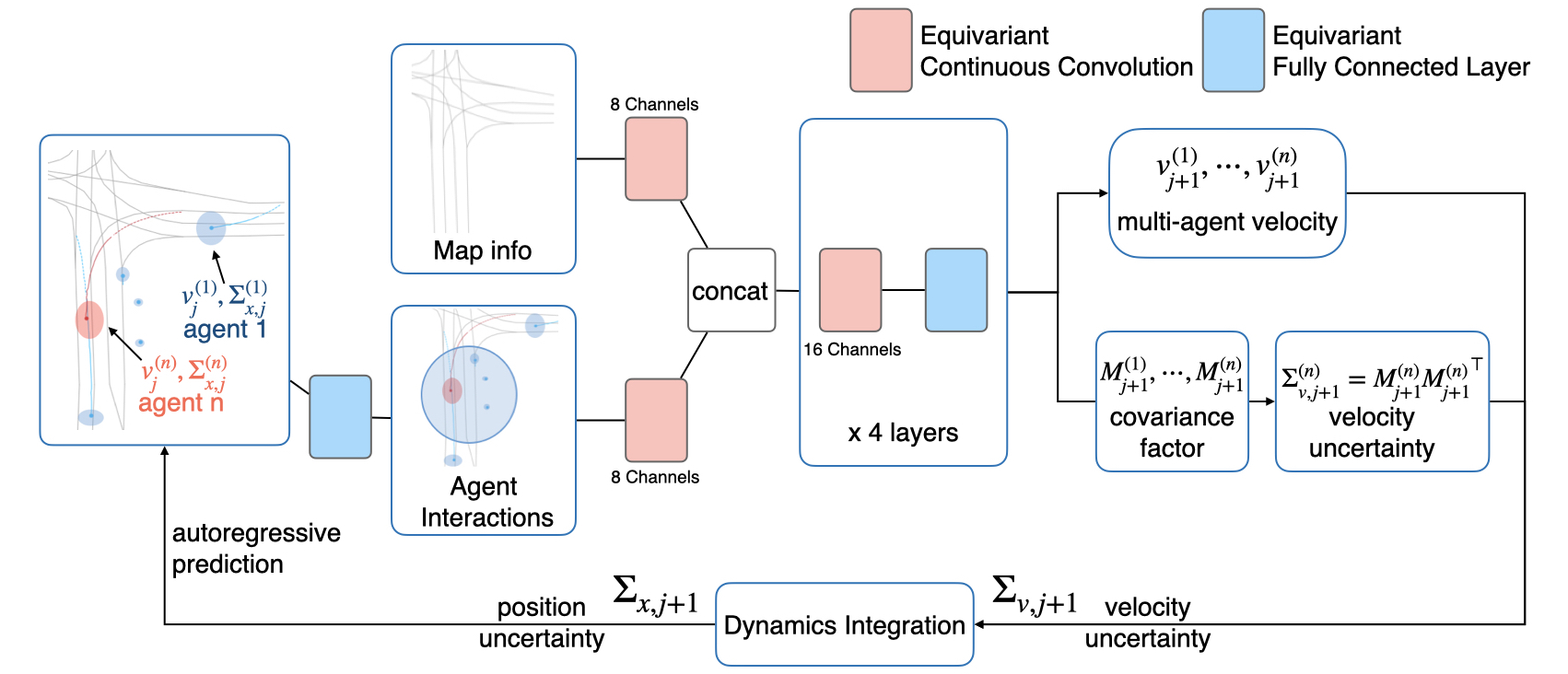
Learning multi-agent dynamics is a core AI problem with broad applications in robotics and autonomous driving. While most existing works focus on deterministic prediction, producing probabilistic forecasts to quantify uncertainty and assess risks is critical for downstream decision-making tasks such as motion planning and collision avoidance. Multi-agent dynamics often contains internal symmetry. By leveraging symmetry, specifically rotation equivariance, we can improve not only the prediction accuracy but also uncertainty calibration. We introduce Energy Score, a proper scoring rule, to evaluate probabilistic predictions. We propose a novel deep dynamics model, Probabilistic Equivariant Continuous COnvolution (PECCO) for probabilistic prediction of multi-agent trajectories. PECCO extends equivariant continuous convolution to model the joint velocity distribution of multiple agents. It uses dynamics integration to propagate the uncertainty from velocity to position. On both synthetic and real-world datasets, PECCO shows significant improvements in accuracy and calibration compared to non-equivariant baselines.
PDF Abstract




 Argoverse
Argoverse
