Variational Prototype Replays for Continual Learning
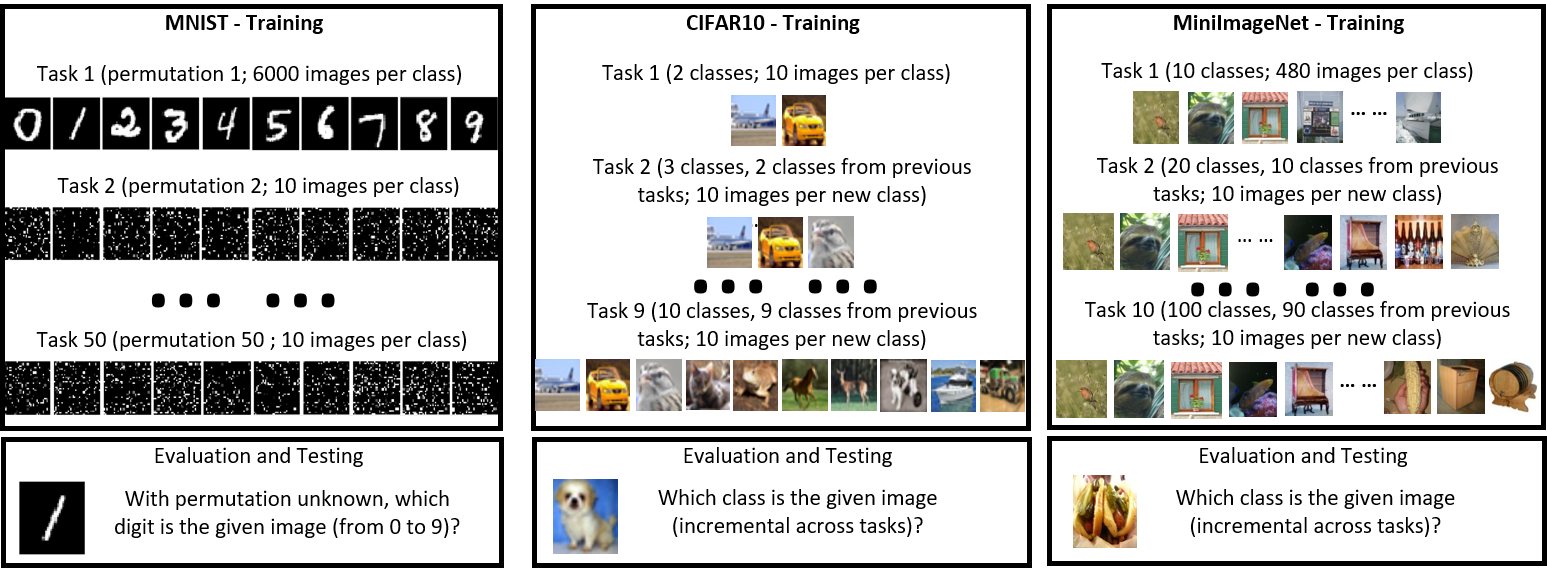
Continual learning refers to the ability to acquire and transfer knowledge without catastrophically forgetting what was previously learned. In this work, we consider \emph{few-shot} continual learning in classification tasks, and we propose a novel method, Variational Prototype Replays, that efficiently consolidates and recalls previous knowledge to avoid catastrophic forgetting. In each classification task, our method learns a set of variational prototypes with their means and variances, where embedding of the samples from the same class can be represented in a prototypical distribution and class-representative prototypes are separated apart. To alleviate catastrophic forgetting, our method replays one sample per class from previous tasks, and correspondingly matches newly predicted embeddings to their nearest class-representative prototypes stored from previous tasks. Compared with recent continual learning approaches, our method can readily adapt to new tasks with more classes without requiring the addition of new units. Furthermore, our method is more memory efficient since only class-representative prototypes with their means and variances, as well as only one sample per class from previous tasks need to be stored. Without tampering with the performance on initial tasks, our method learns novel concepts given a few training examples of each class in new tasks.
PDF Abstract




 CIFAR-10
CIFAR-10
 ImageNet
ImageNet
