PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clouds
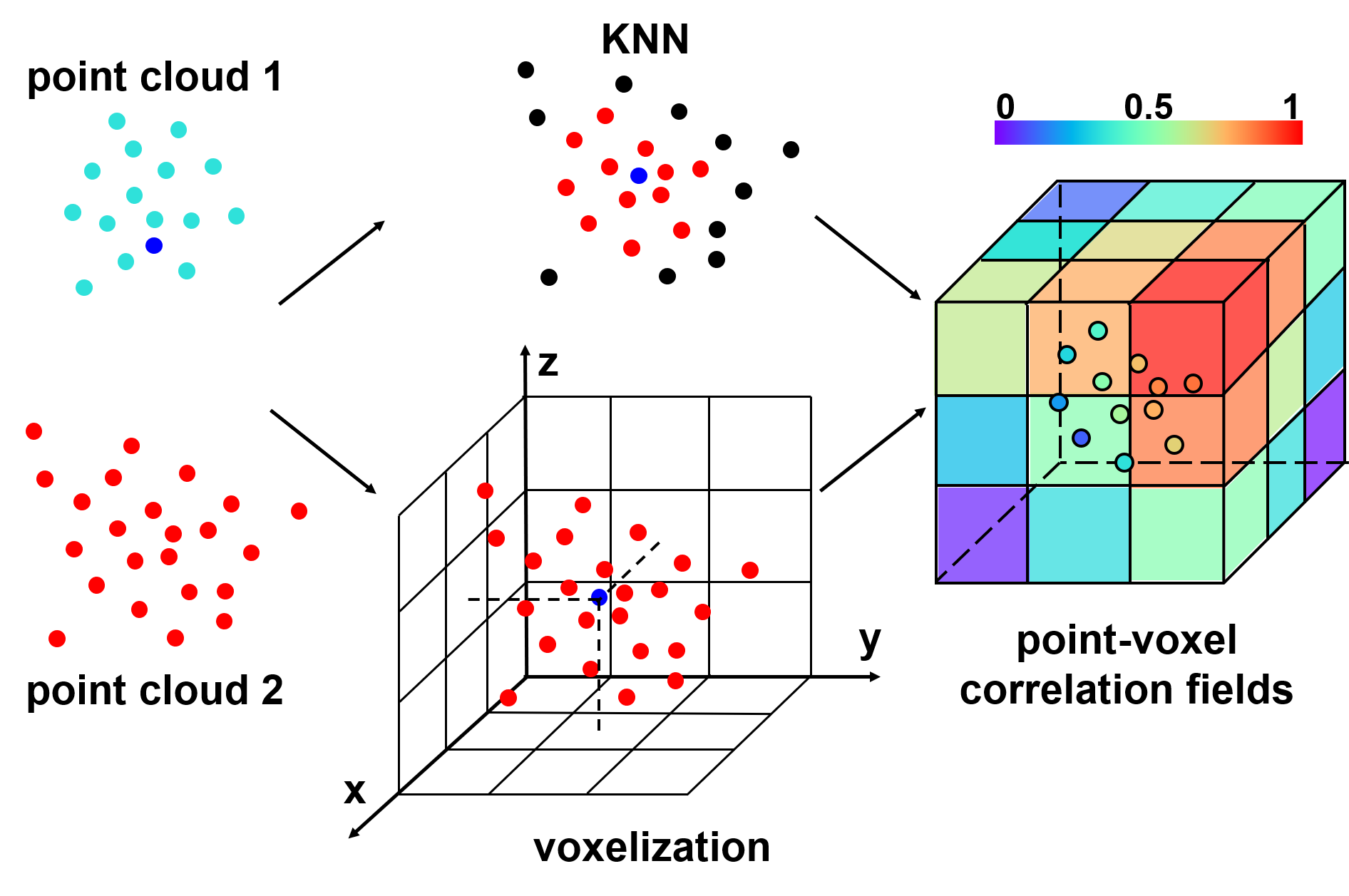
In this paper, we propose a Point-Voxel Recurrent All-Pairs Field Transforms (PV-RAFT) method to estimate scene flow from point clouds. Since point clouds are irregular and unordered, it is challenging to efficiently extract features from all-pairs fields in the 3D space, where all-pairs correlations play important roles in scene flow estimation. To tackle this problem, we present point-voxel correlation fields, which capture both local and long-range dependencies of point pairs. To capture point-based correlations, we adopt the K-Nearest Neighbors search that preserves fine-grained information in the local region. By voxelizing point clouds in a multi-scale manner, we construct pyramid correlation voxels to model long-range correspondences. Integrating these two types of correlations, our PV-RAFT makes use of all-pairs relations to handle both small and large displacements. We evaluate the proposed method on the FlyingThings3D and KITTI Scene Flow 2015 datasets. Experimental results show that PV-RAFT outperforms state-of-the-art methods by remarkable margins.
PDF Abstract CVPR 2021 PDF CVPR 2021 Abstract

 FlyingThings3D
FlyingThings3D
