Robot Perception of Static and Dynamic Objects with an Autonomous Floor Scrubber
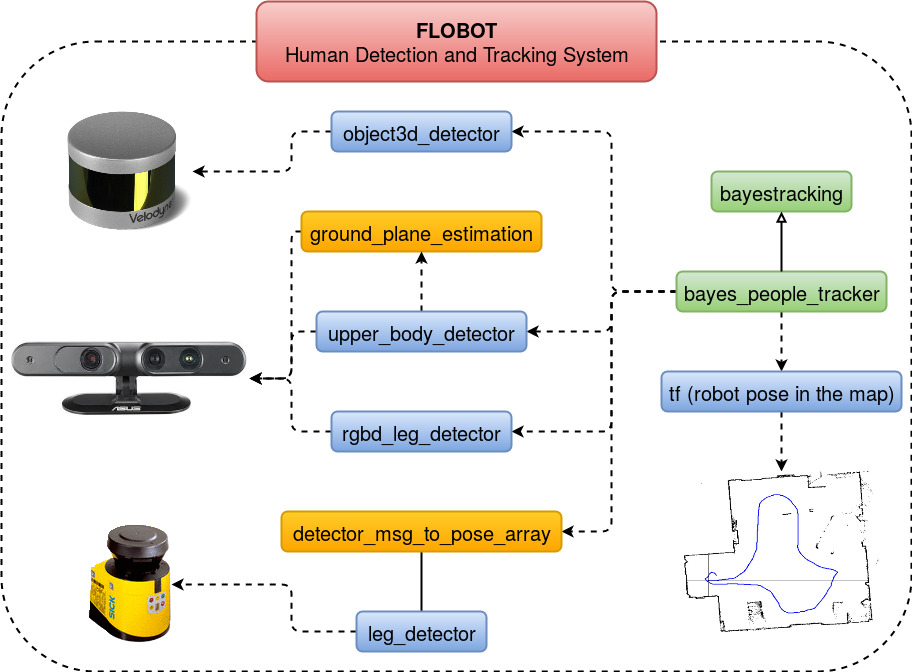
This paper presents the perception system of a new professional cleaning robot for large public places. The proposed system is based on multiple sensors including 3D and 2D lidar, two RGB-D cameras and a stereo camera. The two lidars together with an RGB-D camera are used for dynamic object (human) detection and tracking, while the second RGB-D and stereo camera are used for detection of static objects (dirt and ground objects). A learning and reasoning module for spatial-temporal representation of the environment based on the perception pipeline is also introduced. Furthermore, a new dataset collected with the robot in several public places, including a supermarket, a warehouse and an airport, is released. Baseline results on this dataset for further research and comparison are provided. The proposed system has been fully implemented into the Robot Operating System (ROS) with high modularity, also publicly available to the community.
PDF AbstractCode
Categories
Datasets
Introduced in the Paper:
FLOBOT Perception