Safety-Enhanced Autonomous Driving Using Interpretable Sensor Fusion Transformer
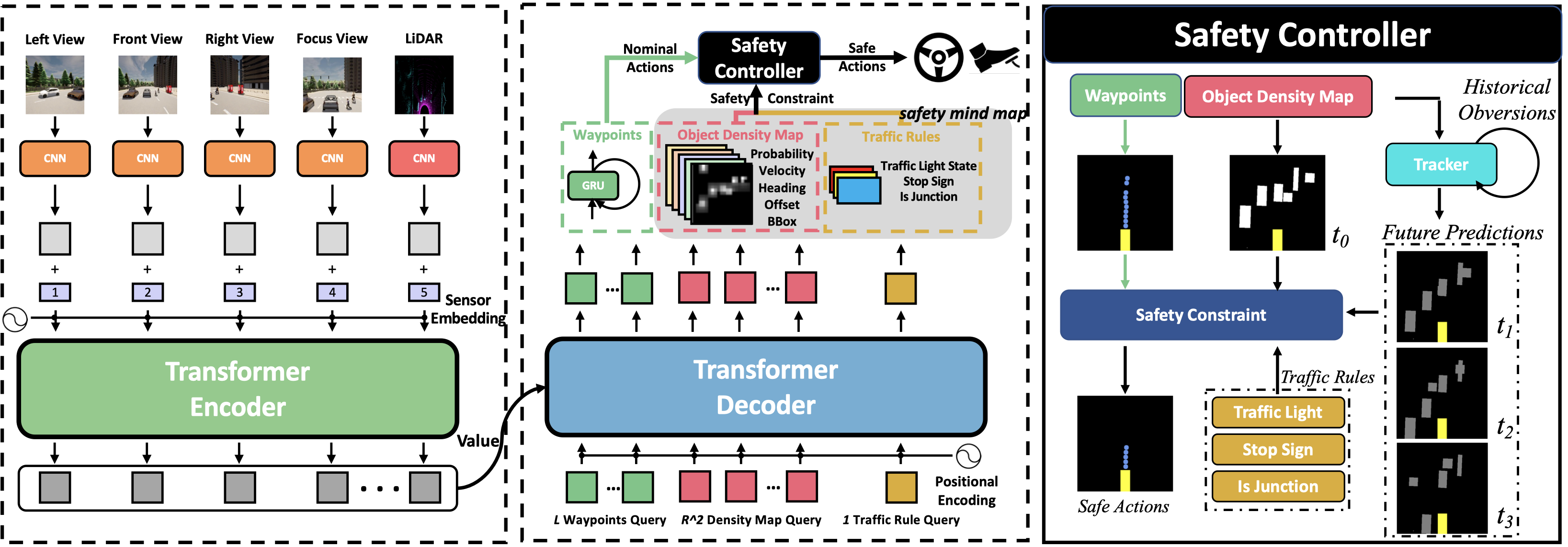
Large-scale deployment of autonomous vehicles has been continually delayed due to safety concerns. On the one hand, comprehensive scene understanding is indispensable, a lack of which would result in vulnerability to rare but complex traffic situations, such as the sudden emergence of unknown objects. However, reasoning from a global context requires access to sensors of multiple types and adequate fusion of multi-modal sensor signals, which is difficult to achieve. On the other hand, the lack of interpretability in learning models also hampers the safety with unverifiable failure causes. In this paper, we propose a safety-enhanced autonomous driving framework, named Interpretable Sensor Fusion Transformer(InterFuser), to fully process and fuse information from multi-modal multi-view sensors for achieving comprehensive scene understanding and adversarial event detection. Besides, intermediate interpretable features are generated from our framework, which provide more semantics and are exploited to better constrain actions to be within the safe sets. We conducted extensive experiments on CARLA benchmarks, where our model outperforms prior methods, ranking the first on the public CARLA Leaderboard. Our code will be made available at https://github.com/opendilab/InterFuser
PDF Abstract



 CARLA
CARLA

