Social-STGCNN: A Social Spatio-Temporal Graph Convolutional Neural Network for Human Trajectory Prediction
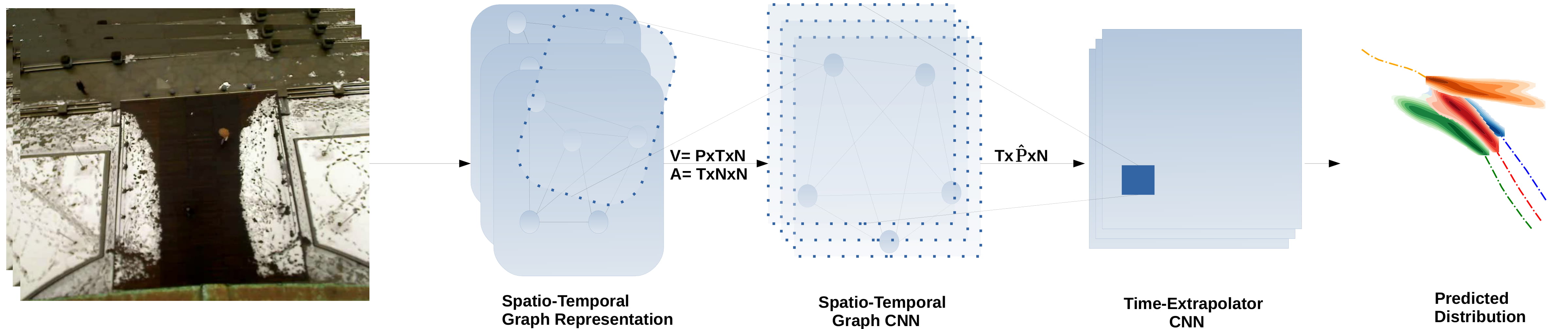
Better machine understanding of pedestrian behaviors enables faster progress in modeling interactions between agents such as autonomous vehicles and humans. Pedestrian trajectories are not only influenced by the pedestrian itself but also by interaction with surrounding objects. Previous methods modeled these interactions by using a variety of aggregation methods that integrate different learned pedestrians states. We propose the Social Spatio-Temporal Graph Convolutional Neural Network (Social-STGCNN), which substitutes the need of aggregation methods by modeling the interactions as a graph. Our results show an improvement over the state of art by 20% on the Final Displacement Error (FDE) and an improvement on the Average Displacement Error (ADE) with 8.5 times less parameters and up to 48 times faster inference speed than previously reported methods. In addition, our model is data efficient, and exceeds previous state of the art on the ADE metric with only 20% of the training data. We propose a kernel function to embed the social interactions between pedestrians within the adjacency matrix. Through qualitative analysis, we show that our model inherited social behaviors that can be expected between pedestrians trajectories. Code is available at https://github.com/abduallahmohamed/Social-STGCNN.
PDF Abstract CVPR 2020 PDF CVPR 2020 Abstract



 UCY
UCY
 ETH
ETH

