SpinNet: Learning a General Surface Descriptor for 3D Point Cloud Registration
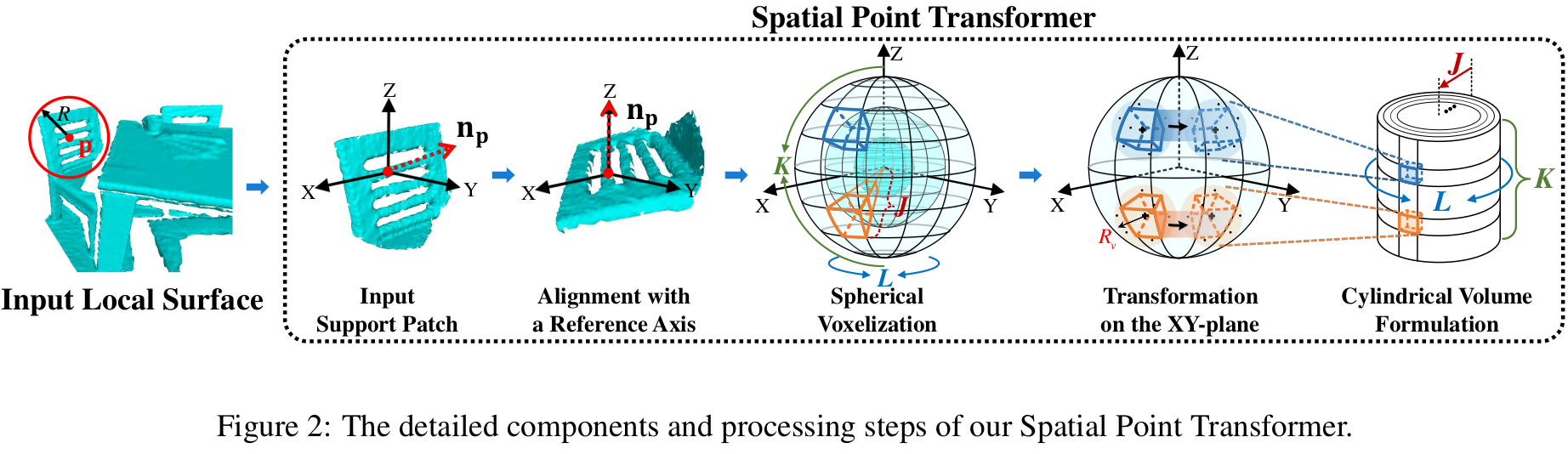
Extracting robust and general 3D local features is key to downstream tasks such as point cloud registration and reconstruction. Existing learning-based local descriptors are either sensitive to rotation transformations, or rely on classical handcrafted features which are neither general nor representative. In this paper, we introduce a new, yet conceptually simple, neural architecture, termed SpinNet, to extract local features which are rotationally invariant whilst sufficiently informative to enable accurate registration. A Spatial Point Transformer is first introduced to map the input local surface into a carefully designed cylindrical space, enabling end-to-end optimization with SO(2) equivariant representation. A Neural Feature Extractor which leverages the powerful point-based and 3D cylindrical convolutional neural layers is then utilized to derive a compact and representative descriptor for matching. Extensive experiments on both indoor and outdoor datasets demonstrate that SpinNet outperforms existing state-of-the-art techniques by a large margin. More critically, it has the best generalization ability across unseen scenarios with different sensor modalities. The code is available at https://github.com/QingyongHu/SpinNet.
PDF Abstract CVPR 2021 PDF CVPR 2021 Abstract

 KITTI
KITTI
 3DMatch
3DMatch
 FPv1
FPv1

