Standardized Max Logits: A Simple yet Effective Approach for Identifying Unexpected Road Obstacles in Urban-Scene Segmentation
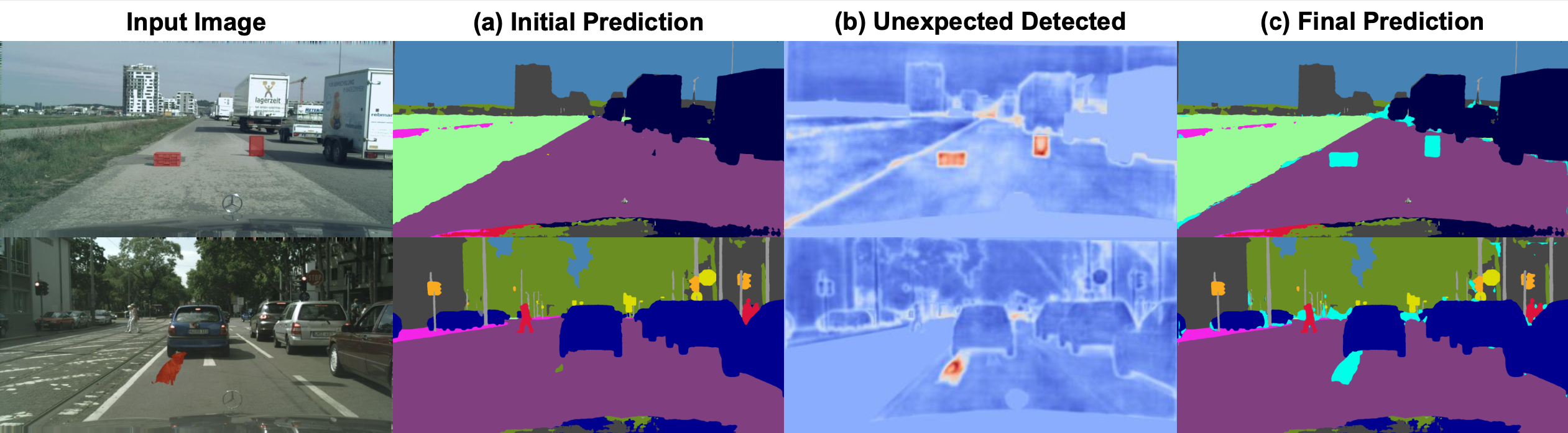
Identifying unexpected objects on roads in semantic segmentation (e.g., identifying dogs on roads) is crucial in safety-critical applications. Existing approaches use images of unexpected objects from external datasets or require additional training (e.g., retraining segmentation networks or training an extra network), which necessitate a non-trivial amount of labor intensity or lengthy inference time. One possible alternative is to use prediction scores of a pre-trained network such as the max logits (i.e., maximum values among classes before the final softmax layer) for detecting such objects. However, the distribution of max logits of each predicted class is significantly different from each other, which degrades the performance of identifying unexpected objects in urban-scene segmentation. To address this issue, we propose a simple yet effective approach that standardizes the max logits in order to align the different distributions and reflect the relative meanings of max logits within each predicted class. Moreover, we consider the local regions from two different perspectives based on the intuition that neighboring pixels share similar semantic information. In contrast to previous approaches, our method does not utilize any external datasets or require additional training, which makes our method widely applicable to existing pre-trained segmentation models. Such a straightforward approach achieves a new state-of-the-art performance on the publicly available Fishyscapes Lost & Found leaderboard with a large margin. Our code is publicly available at this $\href{https://github.com/shjung13/Standardized-max-logits}{link}$.
PDF Abstract ICCV 2021 PDF ICCV 2021 Abstract




 Cityscapes
Cityscapes
 Lost and Found
Lost and Found
 Fishyscapes
Fishyscapes

