Stratified Transformer for 3D Point Cloud Segmentation
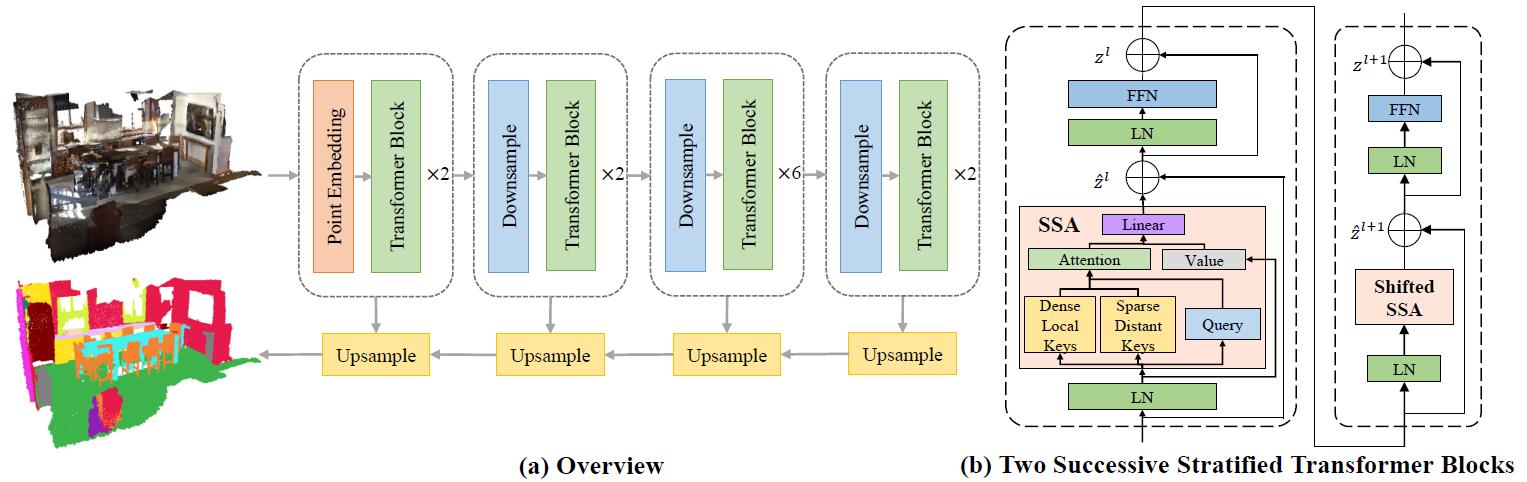
3D point cloud segmentation has made tremendous progress in recent years. Most current methods focus on aggregating local features, but fail to directly model long-range dependencies. In this paper, we propose Stratified Transformer that is able to capture long-range contexts and demonstrates strong generalization ability and high performance. Specifically, we first put forward a novel key sampling strategy. For each query point, we sample nearby points densely and distant points sparsely as its keys in a stratified way, which enables the model to enlarge the effective receptive field and enjoy long-range contexts at a low computational cost. Also, to combat the challenges posed by irregular point arrangements, we propose first-layer point embedding to aggregate local information, which facilitates convergence and boosts performance. Besides, we adopt contextual relative position encoding to adaptively capture position information. Finally, a memory-efficient implementation is introduced to overcome the issue of varying point numbers in each window. Extensive experiments demonstrate the effectiveness and superiority of our method on S3DIS, ScanNetv2 and ShapeNetPart datasets. Code is available at https://github.com/dvlab-research/Stratified-Transformer.
PDF Abstract CVPR 2022 PDF CVPR 2022 Abstract


 ShapeNet
ShapeNet
 ScanNet
ScanNet
 S3DIS
S3DIS

