Training Deep Learning Algorithms on Synthetic Forest Images for Tree Detection
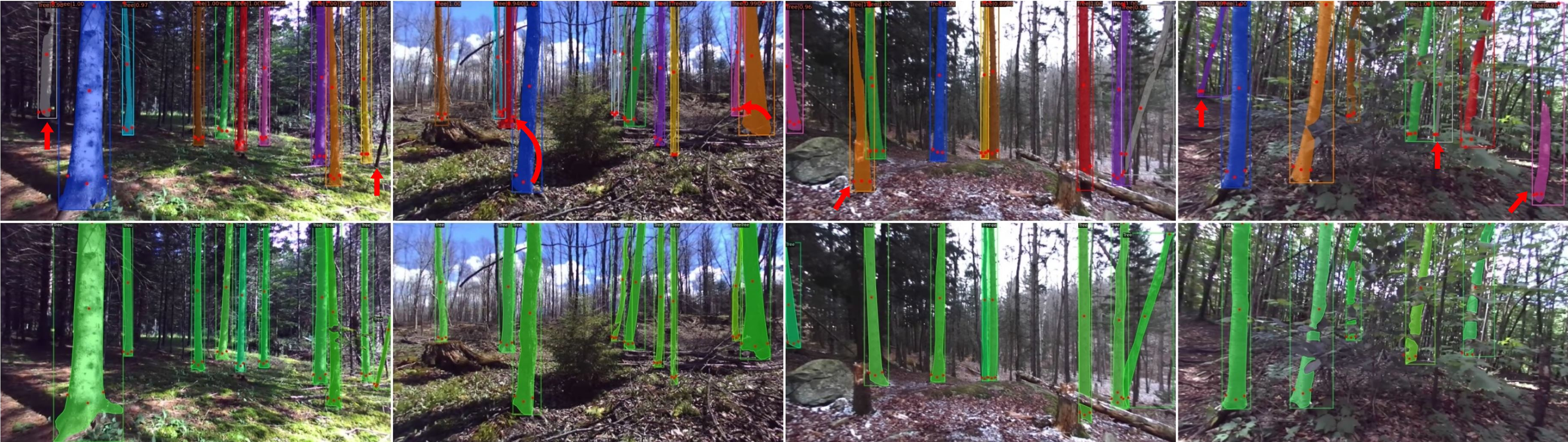
Vision-based segmentation in forested environments is a key functionality for autonomous forestry operations such as tree felling and forwarding. Deep learning algorithms demonstrate promising results to perform visual tasks such as object detection. However, the supervised learning process of these algorithms requires annotations from a large diversity of images. In this work, we propose to use simulated forest environments to automatically generate 43 k realistic synthetic images with pixel-level annotations, and use it to train deep learning algorithms for tree detection. This allows us to address the following questions: i) what kind of performance should we expect from deep learning in harsh synthetic forest environments, ii) which annotations are the most important for training, and iii) what modality should be used between RGB and depth. We also report the promising transfer learning capability of features learned on our synthetic dataset by directly predicting bounding box, segmentation masks and keypoints on real images. Code available on GitHub (https://github.com/norlab-ulaval/PercepTreeV1).
PDF Abstract



 MS COCO
MS COCO
