Unsupervised Learning of Category-Specific Symmetric 3D Keypoints from Point Sets
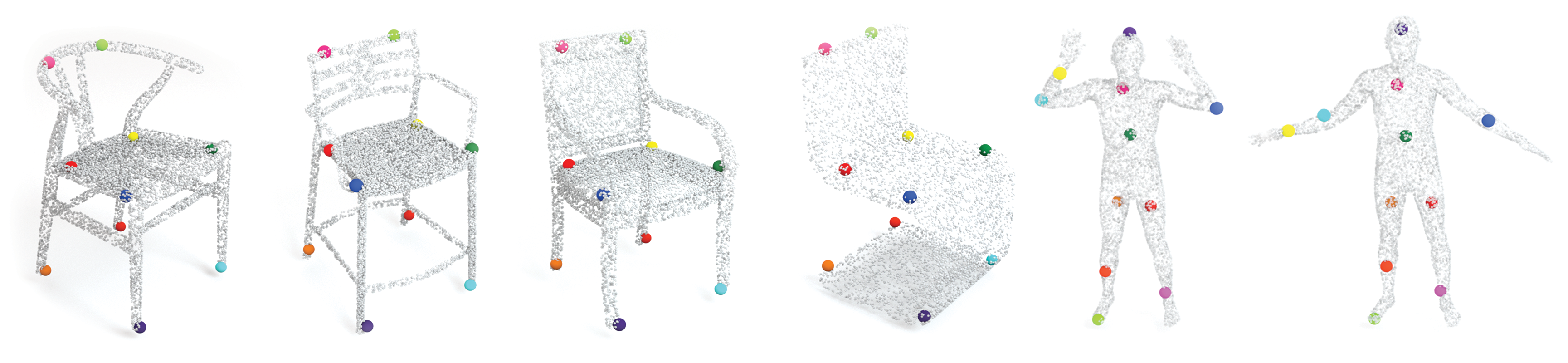
Automatic discovery of category-specific 3D keypoints from a collection of objects of some category is a challenging problem. One reason is that not all objects in a category necessarily have the same semantic parts. The level of difficulty adds up further when objects are represented by 3D point clouds, with variations in shape and unknown coordinate frames. We define keypoints to be category-specific, if they meaningfully represent objects' shape and their correspondences can be simply established order-wise across all objects. This paper aims at learning category-specific 3D keypoints, in an unsupervised manner, using a collection of misaligned 3D point clouds of objects from an unknown category. In order to do so, we model shapes defined by the keypoints, within a category, using the symmetric linear basis shapes without assuming the plane of symmetry to be known. The usage of symmetry prior leads us to learn stable keypoints suitable for higher misalignments. To the best of our knowledge, this is the first work on learning such keypoints directly from 3D point clouds. Using categories from four benchmark datasets, we demonstrate the quality of our learned keypoints by quantitative and qualitative evaluations. Our experiments also show that the keypoints discovered by our method are geometrically and semantically consistent.
PDF Abstract ECCV 2020 PDF ECCV 2020 Abstract
 ModelNet
ModelNet
 Dynamic FAUST
Dynamic FAUST
