View Vertically: A Hierarchical Network for Trajectory Prediction via Fourier Spectrums
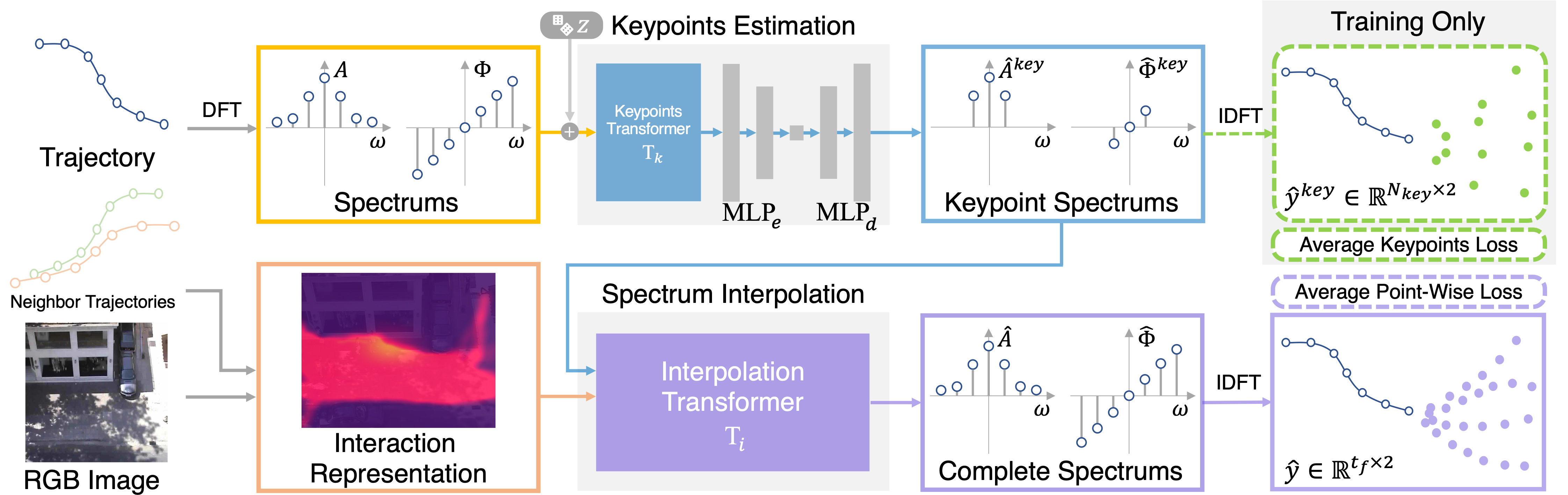
Understanding and forecasting future trajectories of agents are critical for behavior analysis, robot navigation, autonomous cars, and other related applications. Previous methods mostly treat trajectory prediction as time sequence generation. Different from them, this work studies agents' trajectories in a "vertical" view, i.e., modeling and forecasting trajectories from the spectral domain. Different frequency bands in the trajectory spectrums could hierarchically reflect agents' motion preferences at different scales. The low-frequency and high-frequency portions could represent their coarse motion trends and fine motion variations, respectively. Accordingly, we propose a hierarchical network V$^2$-Net, which contains two sub-networks, to hierarchically model and predict agents' trajectories with trajectory spectrums. The coarse-level keypoints estimation sub-network first predicts the "minimal" spectrums of agents' trajectories on several "key" frequency portions. Then the fine-level spectrum interpolation sub-network interpolates the spectrums to reconstruct the final predictions. Experimental results display the competitiveness and superiority of V$^2$-Net on both ETH-UCY benchmark and the Stanford Drone Dataset.
PDF Abstract


 ETH
ETH

