ZebraPose: Coarse to Fine Surface Encoding for 6DoF Object Pose Estimation
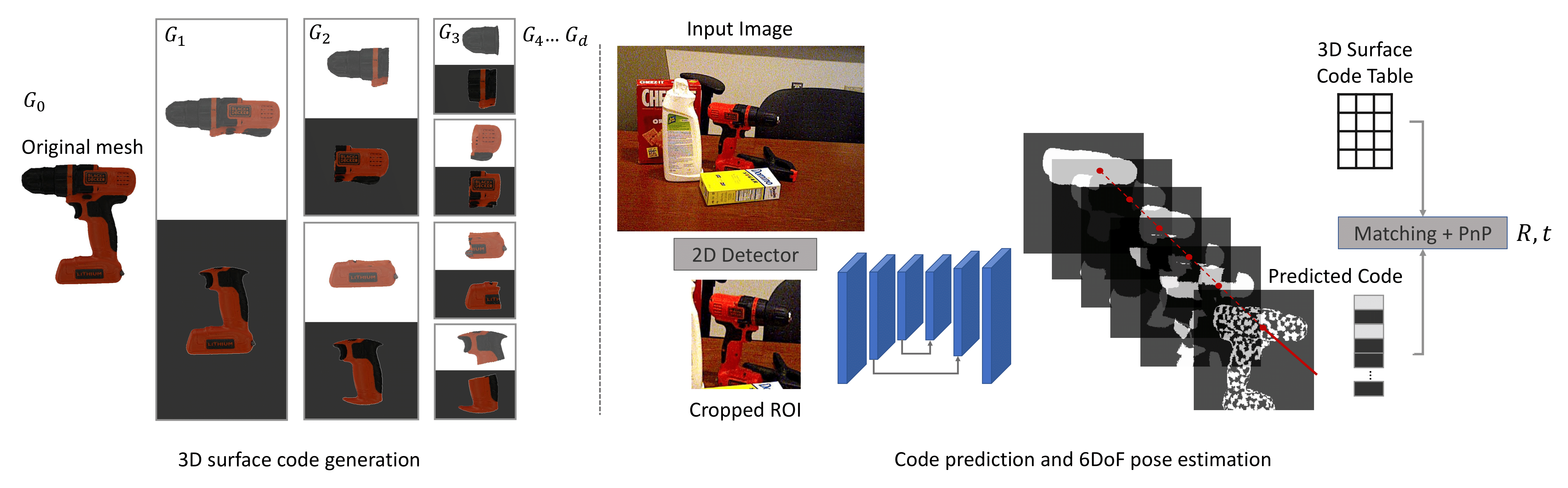
Establishing correspondences from image to 3D has been a key task of 6DoF object pose estimation for a long time. To predict pose more accurately, deeply learned dense maps replaced sparse templates. Dense methods also improved pose estimation in the presence of occlusion. More recently researchers have shown improvements by learning object fragments as segmentation. In this work, we present a discrete descriptor, which can represent the object surface densely. By incorporating a hierarchical binary grouping, we can encode the object surface very efficiently. Moreover, we propose a coarse to fine training strategy, which enables fine-grained correspondence prediction. Finally, by matching predicted codes with object surface and using a PnP solver, we estimate the 6DoF pose. Results on the public LM-O and YCB-V datasets show major improvement over the state of the art w.r.t. ADD(-S) metric, even surpassing RGB-D based methods in some cases.
PDF Abstract CVPR 2022 PDF CVPR 2022 Abstract


