Search Results for author:
Found 18 papers, 13 papers with code
Visual CoT: Unleashing Chain-of-Thought Reasoning in Multi-Modal Language Models
This paper presents Visual CoT, a novel pipeline that leverages the reasoning capabilities of multi-modal large language models (MLLMs) by incorporating visual Chain-of-Thought (CoT) reasoning.
SmartRefine: A Scenario-Adaptive Refinement Framework for Efficient Motion Prediction
Context information, such as road maps and surrounding agents' states, provides crucial geometric and semantic information for motion behavior prediction.

SPHINX-X: Scaling Data and Parameters for a Family of Multi-modal Large Language Models
We propose SPHINX-X, an extensive Multimodality Large Language Model (MLLM) series developed upon SPHINX.
 Ranked #4 on
Video Question Answering
on MVBench
Ranked #4 on
Video Question Answering
on MVBench

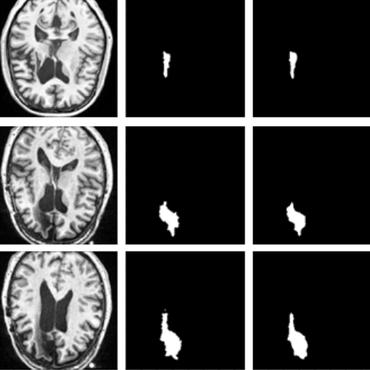
MCANet: Medical Image Segmentation with Multi-Scale Cross-Axis Attention
To process the significant variations of lesion regions or organs in individual sizes and shapes, we also use multiple convolutions of strip-shape kernels with different kernel sizes in each axial attention path to improve the efficiency of the proposed MCA in encoding spatial information.
Polyper: Boundary Sensitive Polyp Segmentation
We present a new boundary sensitive framework for polyp segmentation, called Polyper.
LMDrive: Closed-Loop End-to-End Driving with Large Language Models
On the other hand, previous autonomous driving methods tend to rely on limited-format inputs (e. g. sensor data and navigation waypoints), restricting the vehicle's ability to understand language information and interact with humans.

ReasonNet: End-to-End Driving with Temporal and Global Reasoning
The large-scale deployment of autonomous vehicles is yet to come, and one of the major remaining challenges lies in urban dense traffic scenarios.
 Ranked #1 on
Autonomous Driving
on CARLA Leaderboard
Ranked #1 on
Autonomous Driving
on CARLA Leaderboard
Efficient Reinforcement Learning for Autonomous Driving with Parameterized Skills and Priors
Inspired by this, we propose ASAP-RL, an efficient reinforcement learning algorithm for autonomous driving that simultaneously leverages motion skills and expert priors.
Safety-Enhanced Autonomous Driving Using Interpretable Sensor Fusion Transformer
Large-scale deployment of autonomous vehicles has been continually delayed due to safety concerns.
Ranked #2 on
Autonomous Driving
on CARLA Leaderboard
Blending Anti-Aliasing into Vision Transformer
In this work, we analyze the uncharted problem of aliasing in vision transformer and explore to incorporate anti-aliasing properties.
Leaning Compact and Representative Features for Cross-Modality Person Re-Identification
This paper pays close attention to the cross-modality visible-infrared person re-identification (VI Re-ID) task, which aims to match pedestrian samples between visible and infrared modes.
 Cross-Modality Person Re-identification
Knowledge Distillation
+1
Cross-Modality Person Re-identification
Knowledge Distillation
+1
Self-supervised Temporal Learning
Inspired by spatial-based contrastive SSL, we show that significant improvement can be achieved by a proposed temporal-based contrastive learning approach, which includes three novel and efficient modules: temporal augmentations, temporal memory bank and SSTL loss.

Complementary Boundary Generator with Scale-Invariant Relation Modeling for Temporal Action Localization: Submission to ActivityNet Challenge 2020
Specifically, in order to generate high-quality proposals, we consider several factors including the video feature encoder, the proposal generator, the proposal-proposal relations, the scale imbalance, and ensemble strategy.

1st place solution for AVA-Kinetics Crossover in AcitivityNet Challenge 2020
This technical report introduces our winning solution to the spatio-temporal action localization track, AVA-Kinetics Crossover, in ActivityNet Challenge 2020.
Top-1 Solution of Multi-Moments in Time Challenge 2019
In this technical report, we briefly introduce the solutions of our team 'Efficient' for the Multi-Moments in Time challenge in ICCV 2019.

Overview of the CCKS 2019 Knowledge Graph Evaluation Track: Entity, Relation, Event and QA
Knowledge graph models world knowledge as concepts, entities, and the relationships between them, which has been widely used in many real-world tasks.
Temporal Interlacing Network
In this way, a heavy temporal model is replaced by a simple interlacing operator.

CCKS 2019 Shared Task on Inter-Personal Relationship Extraction
In this paper, we present the task definition, the description of data and the evaluation methodology used during this shared task.
