Search Results for author:
Found 7 papers, 3 papers with code
Lumos: A Library for Diagnosing Metric Regressions in Web-Scale Applications
Web-scale applications can ship code on a daily to weekly cadence.
A Dataset for measuring reading levels in India at scale
One out of four children in India are leaving grade eight without basic reading skills.
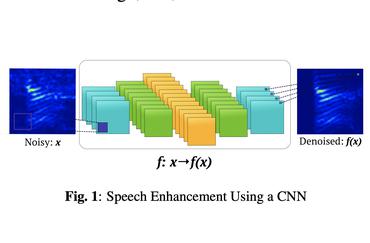
Aura: Privacy-preserving Augmentation to Improve Test Set Diversity in Speech Enhancement
Noise suppression models running in production environments are commonly trained on publicly available datasets.

On Design of Problem Token Questions in Quality of Experience Surveys
Based on 900, 000 calls gathered using a randomized controlled experiment from a live system, we find that the order bias can be significantly reduced by randomizing the display order of tokens.
Resonance: Replacing Software Constants with Context-Aware Models in Real-time Communication
Large software systems tune hundreds of 'constants' to optimize their runtime performance.

Real-time Speech Interruption Analysis: From Cloud to Client Deployment
Meetings are an essential form of communication for all types of organizations, and remote collaboration systems have been much more widely used since the COVID-19 pandemic.
Improving Meeting Inclusiveness using Speech Interruption Analysis
In order to drive adoption of its usage to improve inclusiveness (and participation), we present a machine learning-based system that predicts when a meeting participant attempts to obtain the floor, but fails to interrupt (termed a `failed interruption').
