Search Results for author:
Found 45 papers, 24 papers with code
Historical Astronomical Diagrams Decomposition in Geometric Primitives
Automatically extracting the geometric content from the hundreds of thousands of diagrams drawn in historical manuscripts would enable historians to study the diffusion of astronomical knowledge on a global scale.
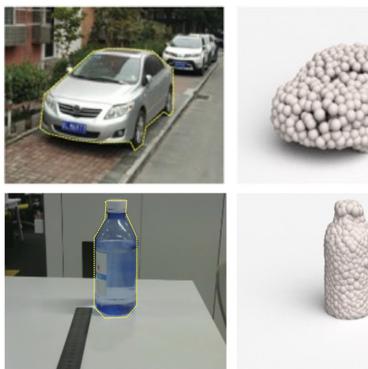
FocalPose++: Focal Length and Object Pose Estimation via Render and Compare
We introduce FocalPose++, a neural render-and-compare method for jointly estimating the camera-object 6D pose and camera focal length given a single RGB input image depicting a known object.


Differentiable Blocks World: Qualitative 3D Decomposition by Rendering Primitives
We compare our approach to the state of the art on diverse scenes from DTU, and demonstrate its robustness on real-life captures from BlendedMVS and Nerfstudio.
Learnable Earth Parser: Discovering 3D Prototypes in Aerial Scans
We demonstrate the usefulness of our model on a novel dataset of seven large aerial LiDAR scans from diverse real-world scenarios.

Pixel-wise Agricultural Image Time Series Classification: Comparisons and a Deformable Prototype-based Approach
Improvements in Earth observation by satellites allow for imagery of ever higher temporal and spatial resolution.
The Learnable Typewriter: A Generative Approach to Text Analysis
Second, we show the potential of our method for new applications, more specifically in the field of paleography, which studies the history and variations of handwriting, and for cipher analysis.
MegaPose: 6D Pose Estimation of Novel Objects via Render & Compare
Second, we introduce a novel approach for coarse pose estimation which leverages a network trained to classify whether the pose error between a synthetic rendering and an observed image of the same object can be corrected by the refiner.

Online Segmentation of LiDAR Sequences: Dataset and Algorithm
Roof-mounted spinning LiDAR sensors are widely used by autonomous vehicles.
 Ranked #1 on
Real-Time Semantic Segmentation
on HelixNet
Ranked #1 on
Real-Time Semantic Segmentation
on HelixNet

Learning Joint Surface Atlases
We demonstrate that this improves the quality of the learned surface representation, as well as its consistency in a collection of related shapes.
Share With Thy Neighbors: Single-View Reconstruction by Cross-Instance Consistency
Approaches for single-view reconstruction typically rely on viewpoint annotations, silhouettes, the absence of background, multiple views of the same instance, a template shape, or symmetry.
 3D Object Reconstruction From A Single Image
3D Object Reconstruction From A Single Image
 3D Reconstruction
+2
3D Reconstruction
+2
Focal Length and Object Pose Estimation via Render and Compare
We introduce FocalPose, a neural render-and-compare method for jointly estimating the camera-object 6D pose and camera focal length given a single RGB input image depicting a known object.
Improving neural implicit surfaces geometry with patch warping
Neural implicit surfaces have become an important technique for multi-view 3D reconstruction but their accuracy remains limited.
Re-ranking for image retrieval and transductive few-shot classification
In the problems of image retrieval and few-shot classification, the mainstream approaches focus on learning a better feature representation.

Learning Co-segmentation by Segment Swapping for Retrieval and Discovery
The goal of this work is to efficiently identify visually similar patterns in images, e. g. identifying an artwork detail copied between an engraving and an oil painting, or recognizing parts of a night-time photograph visible in its daytime counterpart.
Representing Shape Collections with Alignment-Aware Linear Models
In this paper, we revisit the classical representation of 3D point clouds as linear shape models.
Image Collation: Matching illustrations in manuscripts
For an historian, the first step in studying their evolution in a corpus of similar manuscripts is to identify which ones correspond to each other.
Deep Multi-View Stereo gone wild
Deep multi-view stereo (MVS) methods have been developed and extensively compared on simple datasets, where they now outperform classical approaches.

Unsupervised Layered Image Decomposition into Object Prototypes
We present an unsupervised learning framework for decomposing images into layers of automatically discovered object models.
Single-view robot pose and joint angle estimation via render & compare
We introduce RoboPose, a method to estimate the joint angles and the 6D camera-to-robot pose of a known articulated robot from a single RGB image.
 Ranked #3 on
Robot Pose Estimation
on DREAM-dataset
Ranked #3 on
Robot Pose Estimation
on DREAM-dataset
docExtractor: An off-the-shelf historical document element extraction
We present docExtractor, a generic approach for extracting visual elements such as text lines or illustrations from historical documents without requiring any real data annotation.

Learning to Guide Local Feature Matches
We tackle the problem of finding accurate and robust keypoint correspondences between images.
CosyPose: Consistent multi-view multi-object 6D pose estimation
Second, we develop a robust method for matching individual 6D object pose hypotheses across different input images in order to jointly estimate camera viewpoints and 6D poses of all objects in a single consistent scene.

Impact of base dataset design on few-shot image classification
In this paper, we systematically study the effect of variations in the training data by evaluating deep features trained on different image sets in a few-shot classification setting.

Spherical Perspective on Learning with Normalization Layers
Normalization Layers (NLs) are widely used in modern deep-learning architectures.
Deep Transformation-Invariant Clustering
In contrast, we present an orthogonal approach that does not rely on abstract features but instead learns to predict image transformations and performs clustering directly in image space.
 Ranked #2 on
Unsupervised Image Classification
on SVHN
(using extra training data)
Ranked #2 on
Unsupervised Image Classification
on SVHN
(using extra training data)


RANSAC-Flow: generic two-stage image alignment
Coarse alignment is performed using RANSAC on off-the-shelf deep features.

Learning elementary structures for 3D shape generation and matching
We propose to represent shapes as the deformation and combination of learnable elementary 3D structures, which are primitives resulting from training over a collection of shape.
 Ranked #8 on
3D Dense Shape Correspondence
on SHREC'19
(using extra training data)
Ranked #8 on
3D Dense Shape Correspondence
on SHREC'19
(using extra training data)

Unsupervised cycle-consistent deformation for shape matching
We propose a self-supervised approach to deep surface deformation.
Pose from Shape: Deep Pose Estimation for Arbitrary 3D Objects
Most deep pose estimation methods need to be trained for specific object instances or categories.
Monte-Carlo Tree Search for Efficient Visually Guided Rearrangement Planning
We address the problem of visually guided rearrangement planning with many movable objects, i. e., finding a sequence of actions to move a set of objects from an initial arrangement to a desired one, while relying on visual inputs coming from an RGB camera.
Discovering Visual Patterns in Art Collections with Spatially-consistent Feature Learning
Our goal in this paper is to discover near duplicate patterns in large collections of artworks.


Virtual Training for a Real Application: Accurate Object-Robot Relative Localization without Calibration
Localizing an object accurately with respect to a robot is a key step for autonomous robotic manipulation.
Unsupervised Image Decomposition in Vector Layers
Deep image generation is becoming a tool to enhance artists and designers creativity potential.

3D-CODED: 3D Correspondences by Deep Deformation
By predicting this feature for a new shape, we implicitly predict correspondences between this shape and the template.
3D-CODED : 3D Correspondences by Deep Deformation
By predicting this feature for a new shape, we implicitly predict correspondences between this shape and the template.
Ranked #9 on
3D Dense Shape Correspondence
on SHREC'19
(using extra training data)

A Papier-Mâché Approach to Learning 3D Surface Generation
We introduce a method for learning to generate the surface of 3D shapes.


AtlasNet: A Papier-Mâché Approach to Learning 3D Surface Generation
We introduce a method for learning to generate the surface of 3D shapes.
 Ranked #5 on
Point Cloud Completion
on Completion3D
Ranked #5 on
Point Cloud Completion
on Completion3D
3D Sketching using Multi-View Deep Volumetric Prediction
The main strengths of our approach are its robustness to freehand bitmap drawings, its ability to adapt to different object categories, and the continuum it offers between single-view and multi-view sketch-based modeling.
Crafting a multi-task CNN for viewpoint estimation
Convolutional Neural Networks (CNNs) were recently shown to provide state-of-the-art results for object category viewpoint estimation.

Learning Dense Correspondence via 3D-guided Cycle Consistency
We use ground-truth synthetic-to-synthetic correspondences, provided by the rendering engine, to train a ConvNet to predict synthetic-to-real, real-to-real and real-to-synthetic correspondences that are cycle-consistent with the ground-truth.
Deep Exemplar 2D-3D Detection by Adapting from Real to Rendered Views
This paper presents an end-to-end convolutional neural network (CNN) for 2D-3D exemplar detection.
Understanding deep features with computer-generated imagery
The rendered images are presented to a trained CNN and responses for different layers are studied with respect to the input scene factors.
Convolutional Neural Networks for joint object detection and pose estimation: A comparative study
In this paper we study the application of convolutional neural networks for jointly detecting objects depicted in still images and estimating their 3D pose.
Seeing 3D Chairs: Exemplar Part-based 2D-3D Alignment using a Large Dataset of CAD Models
This paper poses object category detection in images as a type of 2D-to-3D alignment problem, utilizing the large quantities of 3D CAD models that have been made publicly available online.
