Search Results for author:
Found 82 papers, 46 papers with code
Video Inpainting of Complex Scenes
Our algorithm is able to deal with a variety of challenging situations which naturally arise in video inpainting, such as the correct reconstruction of dynamic textures, multiple moving objects and moving background.

Sketching for Large-Scale Learning of Mixture Models
We propose a "compressive learning" framework where we estimate model parameters from a sketch of the training data.
Approximate search with quantized sparse representations
This paper tackles the task of storing a large collection of vectors, such as visual descriptors, and of searching in it.
ROAM: a Rich Object Appearance Model with Application to Rotoscoping
Rotoscoping, the detailed delineation of scene elements through a video shot, is a painstaking task of tremendous importance in professional post-production pipelines.
Unifying local and non-local signal processing with graph CNNs
This paper deals with the unification of local and non-local signal processing on graphs within a single convolutional neural network (CNN) framework.

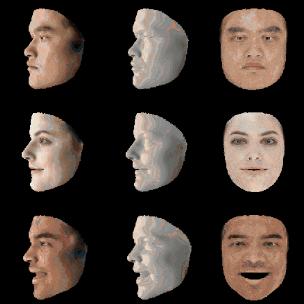
MoFA: Model-based Deep Convolutional Face Autoencoder for Unsupervised Monocular Reconstruction
In this work we propose a novel model-based deep convolutional autoencoder that addresses the highly challenging problem of reconstructing a 3D human face from a single in-the-wild color image.
SUBIC: A supervised, structured binary code for image search
For large-scale visual search, highly compressed yet meaningful representations of images are essential.

Audio style transfer
"Style transfer" among images has recently emerged as a very active research topic, fuelled by the power of convolution neural networks (CNNs), and has become fast a very popular technology in social media.
Sound Audio and Speech Processing Classical Physics
Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz
To alleviate this problem, we present the first approach that jointly learns 1) a regressor for face shape, expression, reflectance and illumination on the basis of 2) a concurrently learned parametric face model.
Learning a Complete Image Indexing Pipeline
To work at scale, a complete image indexing system comprises two components: An inverted file index to restrict the actual search to only a subset that should contain most of the items relevant to the query; An approximate distance computation mechanism to rapidly scan these lists.

Finding beans in burgers: Deep semantic-visual embedding with localization
Several works have proposed to learn a two-path neural network that maps images and texts, respectively, to a same shared Euclidean space where geometry captures useful semantic relationships.

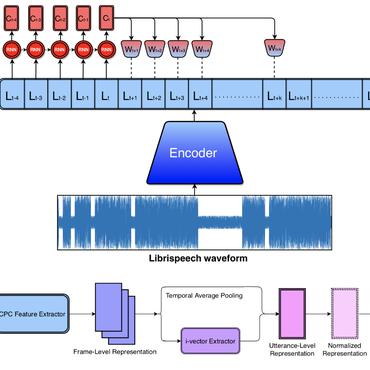
Weakly Supervised Representation Learning for Unsynchronized Audio-Visual Events
Audio-visual representation learning is an important task from the perspective of designing machines with the ability to understand complex events.

Deep Video Portraits
In order to enable source-to-target video re-animation, we render a synthetic target video with the reconstructed head animation parameters from a source video, and feed it into the trained network -- thus taking full control of the target.
A Flexible Convolutional Solver with Application to Photorealistic Style Transfer
In contrast to existing convnets that address the same task, our architecture derives directly from the structure of the gradient descent originally used to solve the style transfer problem [Gatys et al., 2016].
Identify, locate and separate: Audio-visual object extraction in large video collections using weak supervision
We tackle the problem of audiovisual scene analysis for weakly-labeled data.

ADVENT: Adversarial Entropy Minimization for Domain Adaptation in Semantic Segmentation
Semantic segmentation is a key problem for many computer vision tasks.
 Ranked #4 on
Domain Adaptation
on Panoptic SYNTHIA-to-Mapillary
Ranked #4 on
Domain Adaptation
on Panoptic SYNTHIA-to-Mapillary

FML: Face Model Learning from Videos
In contrast, we propose multi-frame video-based self-supervised training of a deep network that (i) learns a face identity model both in shape and appearance while (ii) jointly learning to reconstruct 3D faces.

DADA: Depth-aware Domain Adaptation in Semantic Segmentation
As a result, the performance of the trained semantic segmentation model on the target domain is boosted.
![]() Ranked #17 on
Image-to-Image Translation
on SYNTHIA-to-Cityscapes
Ranked #17 on
Image-to-Image Translation
on SYNTHIA-to-Cityscapes

SoDeep: a Sorting Deep net to learn ranking loss surrogates
Our approach is based on a deep architecture that approximates the sorting of arbitrary sets of scores.

Zero-Shot Semantic Segmentation
Semantic segmentation models are limited in their ability to scale to large numbers of object classes.
 Ranked #1 on
Zero-Shot Learning
on PASCAL Context
Ranked #1 on
Zero-Shot Learning
on PASCAL Context
Boosting Few-Shot Visual Learning with Self-Supervision
Few-shot learning and self-supervised learning address different facets of the same problem: how to train a model with little or no labeled data.

Addressing Failure Prediction by Learning Model Confidence
In this paper, we propose a new target criterion for model confidence, corresponding to the True Class Probability (TCP).

This dataset does not exist: training models from generated images
This naturally brings the question: Can we train a classifier only on the generated data?
xMUDA: Cross-Modal Unsupervised Domain Adaptation for 3D Semantic Segmentation
In this work, we explore how to learn from multi-modality and propose cross-modal UDA (xMUDA) where we assume the presence of 2D images and 3D point clouds for 3D semantic segmentation.

Addressing Failure Detection by Learning Model Confidence
In this paper, we propose a new target criterion for model confidence, corresponding to the True Class Probability (TCP).
QUEST: Quantized embedding space for transferring knowledge
Knowledge distillation refers to the process of training a compact student network to achieve better accuracy by learning from a high capacity teacher network.
Scattering Features for Multimodal Gait Recognition
We consider the problem of identifying people on the basis of their walk (gait) pattern.

Deep Reinforcement Learning for Autonomous Driving: A Survey
With the development of deep representation learning, the domain of reinforcement learning (RL) has become a powerful learning framework now capable of learning complex policies in high dimensional environments.
Learning Representations by Predicting Bags of Visual Words
Inspired by the success of NLP methods in this area, in this work we propose a self-supervised approach based on spatially dense image descriptions that encode discrete visual concepts, here called visual words.
StyleRig: Rigging StyleGAN for 3D Control over Portrait Images
StyleGAN generates photorealistic portrait images of faces with eyes, teeth, hair and context (neck, shoulders, background), but lacks a rig-like control over semantic face parameters that are interpretable in 3D, such as face pose, expressions, and scene illumination.
Handling new target classes in semantic segmentation with domain adaptation
In this work, we define and address a novel domain adaptation (DA) problem in semantic scene segmentation, where the target domain not only exhibits a data distribution shift w. r. t.

Photo style transfer with consistency losses
We address the problem of style transfer between two photos and propose a new way to preserve photorealism.
ESL: Entropy-guided Self-supervised Learning for Domain Adaptation in Semantic Segmentation
While fully-supervised deep learning yields good models for urban scene semantic segmentation, these models struggle to generalize to new environments with different lighting or weather conditions for instance.
Spherical Perspective on Learning with Normalization Layers
Normalization Layers (NLs) are widely used in modern deep-learning architectures.
Toward unsupervised, multi-object discovery in large-scale image collections
This paper addresses the problem of discovering the objects present in a collection of images without any supervision.
 Ranked #1 on
Multi-object colocalization
on VOC_all
Ranked #1 on
Multi-object colocalization
on VOC_all
VRUNet: Multi-Task Learning Model for Intent Prediction of Vulnerable Road Users
In this paper we propose a multi-task learning model to predict pedestrian actions, crossing intent and forecast their future path from video sequences.


PIE: Portrait Image Embedding for Semantic Control
We present the first approach for embedding real portrait images in the latent space of StyleGAN, which allows for intuitive editing of the head pose, facial expression, and scene illumination in the image.
Detecting 32 Pedestrian Attributes for Autonomous Vehicles
By increasing the number of attributes jointly learned, we highlight an issue related to the scales of gradients, which arises in MTL with numerous tasks.
Driving Behavior Explanation with Multi-level Fusion
In this era of active development of autonomous vehicles, it becomes crucial to provide driving systems with the capacity to explain their decisions.
Confidence Estimation via Auxiliary Models
In this paper, we introduce a novel target criterion for model confidence, namely the true class probability (TCP).

Artificial Dummies for Urban Dataset Augmentation
This is achieved with a data generator (called DummyNet) with disentangled control of the pose, the appearance, and the target background scene.
OBoW: Online Bag-of-Visual-Words Generation for Self-Supervised Learning
With this in mind, we propose a teacher-student scheme to learn representations by training a convolutional net to reconstruct a bag-of-visual-words (BoW) representation of an image, given as input a perturbed version of that same image.
 Ranked #18 on
Semi-Supervised Image Classification
on ImageNet - 1% labeled data
(Top 5 Accuracy metric)
Ranked #18 on
Semi-Supervised Image Classification
on ImageNet - 1% labeled data
(Top 5 Accuracy metric)

Explainability of deep vision-based autonomous driving systems: Review and challenges
The concept of explainability has several facets and the need for explainability is strong in driving, a safety-critical application.
Cross-modal Learning for Domain Adaptation in 3D Semantic Segmentation
Domain adaptation is an important task to enable learning when labels are scarce.
 Ranked #2 on
Continual Learning
on Cifar100 (20 tasks)
Ranked #2 on
Continual Learning
on Cifar100 (20 tasks)
StyleLess layer: Improving robustness for real-world driving
Robustness to various image corruptions, caused by changing weather conditions or sensor degradation and aging, is crucial for safety when such vehicles are deployed in the real world.
Multi-View Radar Semantic Segmentation
Understanding the scene around the ego-vehicle is key to assisted and autonomous driving.
Neural Monocular 3D Human Motion Capture with Physical Awareness
We present a new trainable system for physically plausible markerless 3D human motion capture, which achieves state-of-the-art results in a broad range of challenging scenarios.

Semantic Palette: Guiding Scene Generation with Class Proportions
Despite the recent progress of generative adversarial networks (GANs) at synthesizing photo-realistic images, producing complex urban scenes remains a challenging problem.


Large-Scale Unsupervised Object Discovery
Extensive experiments on COCO and OpenImages show that, in the single-object discovery setting where a single prominent object is sought in each image, the proposed LOD (Large-scale Object Discovery) approach is on par with, or better than the state of the art for medium-scale datasets (up to 120K images), and over 37% better than the only other algorithms capable of scaling up to 1. 7M images.
Multi-Target Adversarial Frameworks for Domain Adaptation in Semantic Segmentation
In this work, we address the task of unsupervised domain adaptation (UDA) for semantic segmentation in presence of multiple target domains: The objective is to train a single model that can handle all these domains at test time.
LiDARTouch: Monocular metric depth estimation with a few-beam LiDAR
In such a monocular setup, dense depth is obtained with either additional input from one or several expensive LiDARs, e. g., with 64 beams, or camera-only methods, which suffer from scale-ambiguity and infinite-depth problems.


Raising context awareness in motion forecasting
Learning-based trajectory prediction models have encountered great success, with the promise of leveraging contextual information in addition to motion history.
Localizing Objects with Self-Supervised Transformers and no Labels
We also show that training a class-agnostic detector on the discovered objects boosts results by another 7 points.
 Ranked #4 on
Weakly-Supervised Object Localization
on CUB-200-2011
(Top-1 Localization Accuracy metric)
Ranked #4 on
Weakly-Supervised Object Localization
on CUB-200-2011
(Top-1 Localization Accuracy metric)
STEEX: Steering Counterfactual Explanations with Semantics
In this work, we address the problem of producing counterfactual explanations for high-quality images and complex scenes.
CSG0: Continual Urban Scene Generation with Zero Forgetting
With the rapid advances in generative adversarial networks (GANs), the visual quality of synthesised scenes keeps improving, including for complex urban scenes with applications to automated driving.

Raw High-Definition Radar for Multi-Task Learning
With their robustness to adverse weather conditions and ability to measure speeds, radar sensors have been part of the automotive landscape for more than two decades.

Drive&Segment: Unsupervised Semantic Segmentation of Urban Scenes via Cross-modal Distillation
This work investigates learning pixel-wise semantic image segmentation in urban scenes without any manual annotation, just from the raw non-curated data collected by cars which, equipped with cameras and LiDAR sensors, drive around a city.

Multi-Head Distillation for Continual Unsupervised Domain Adaptation in Semantic Segmentation
Unsupervised Domain Adaptation (UDA) is a transfer learning task which aims at training on an unlabeled target domain by leveraging a labeled source domain.
HULC: 3D Human Motion Capture with Pose Manifold Sampling and Dense Contact Guidance
Marker-less monocular 3D human motion capture (MoCap) with scene interactions is a challenging research topic relevant for extended reality, robotics and virtual avatar generation.
LaRa: Latents and Rays for Multi-Camera Bird's-Eye-View Semantic Segmentation
Recent works in autonomous driving have widely adopted the bird's-eye-view (BEV) semantic map as an intermediate representation of the world.
 Ranked #6 on
Bird's-Eye View Semantic Segmentation
on nuScenes
Ranked #6 on
Bird's-Eye View Semantic Segmentation
on nuScenes
Active Learning Strategies for Weakly-supervised Object Detection
On COCO, using on average 10 fully-annotated images per class, or equivalently 1% of the training set, BiB also reduces the performance gap (in AP) between the weakly-supervised detector and the fully-supervised Fast RCNN by over 70%, showing a good trade-off between performance and data efficiency.
Self-supervised learning with rotation-invariant kernels
We introduce a regularization loss based on kernel mean embeddings with rotation-invariant kernels on the hypersphere (also known as dot-product kernels) for self-supervised learning of image representations.
Take One Gram of Neural Features, Get Enhanced Group Robustness
Predictive performance of machine learning models trained with empirical risk minimization (ERM) can degrade considerably under distribution shifts.
OCTET: Object-aware Counterfactual Explanations
We conduct a set of experiments on counterfactual explanation benchmarks for driving scenes, and we show that our method can be adapted beyond classification, e. g., to explain semantic segmentation models.
PØDA: Prompt-driven Zero-shot Domain Adaptation
In this paper, we propose the task of `Prompt-driven Zero-shot Domain Adaptation', where we adapt a model trained on a source domain using only a general description in natural language of the target domain, i. e., a prompt.
Unsupervised Object Localization: Observing the Background to Discover Objects
This way, the salient objects emerge as a by-product without any strong assumption on what an object should be.

PODA: Prompt-driven Zero-shot Domain Adaptation
In this paper, we propose the task of 'Prompt-driven Zero-shot Domain Adaptation', where we adapt a model trained on a source domain using only a general description in natural language of the target domain, i. e., a prompt.

Diverse Probabilistic Trajectory Forecasting with Admissibility Constraints
Predicting multiple trajectories for road users is important for automated driving systems: ego-vehicle motion planning indeed requires a clear view of the possible motions of the surrounding agents.
Towards Motion Forecasting with Real-World Perception Inputs: Are End-to-End Approaches Competitive?
In fact, conventional forecasting methods are usually not trained nor tested in real-world pipelines (e. g., with upstream detection, tracking, and mapping modules).
MOCA: Self-supervised Representation Learning by Predicting Masked Online Codebook Assignments
Self-supervised learning can be used for mitigating the greedy needs of Vision Transformer networks for very large fully-annotated datasets.
DiffHPE: Robust, Coherent 3D Human Pose Lifting with Diffusion
We present an innovative approach to 3D Human Pose Estimation (3D-HPE) by integrating cutting-edge diffusion models, which have revolutionized diverse fields, but are relatively unexplored in 3D-HPE.

T-UDA: Temporal Unsupervised Domain Adaptation in Sequential Point Clouds
Deep perception models have to reliably cope with an open-world setting of domain shifts induced by different geographic regions, sensor properties, mounting positions, and several other reasons.
Decaf: Monocular Deformation Capture for Face and Hand Interactions
At the core of our neural approach are a variational auto-encoder supplying the hand-face depth prior and modules that guide the 3D tracking by estimating the contacts and the deformations.
Unsupervised Object Localization in the Era of Self-Supervised ViTs: A Survey
We propose here a survey of unsupervised object localization methods that discover objects in images without requiring any manual annotation in the era of self-supervised ViTs.
Three Pillars improving Vision Foundation Model Distillation for Lidar
In particular, thanks to our scalable distillation method named ScaLR, we show that scaling the 2D and 3D backbones and pretraining on diverse datasets leads to a substantial improvement of the feature quality.
Resilient Multiple Choice Learning: A learned scoring scheme with application to audio scene analysis
Multiple Choice Learning is a simple framework to tackle multimodal density estimation, using the Winner-Takes-All (WTA) loss for a set of hypotheses.
A Simple Recipe for Language-guided Domain Generalized Segmentation
Generalization to new domains not seen during training is one of the long-standing challenges in deploying neural networks in real-world applications.
ManiPose: Manifold-Constrained Multi-Hypothesis 3D Human Pose Estimation
Monocular 3D human pose estimation (3D-HPE) is an inherently ambiguous task, as a 2D pose in an image might originate from different possible 3D poses.
Reliability in Semantic Segmentation: Can We Use Synthetic Data?
Assessing the reliability of perception models to covariate shifts and out-of-distribution (OOD) detection is crucial for safety-critical applications such as autonomous vehicles.
CLIP-DINOiser: Teaching CLIP a few DINO tricks for open-vocabulary semantic segmentation
We propose to locally improve dense MaskCLIP features, which are computed with a simple modification of CLIP's last pooling layer, by integrating localization priors extracted from self-supervised features.
Manipulating Trajectory Prediction with Backdoors
In this paper, we focus on backdoors - a security threat acknowledged in other fields but so far overlooked for trajectory prediction.
POP-3D: Open-Vocabulary 3D Occupancy Prediction from Images
We describe an approach to predict open-vocabulary 3D semantic voxel occupancy map from input 2D images with the objective of enabling 3D grounding, segmentation and retrieval of free-form language queries.
 3D Semantic Occupancy Prediction
3D Semantic Occupancy Prediction
 3D Semantic Segmentation
+3
3D Semantic Segmentation
+3
