Search Results for author:
Found 23 papers, 14 papers with code
Texture Synthesis with Recurrent Variational Auto-Encoder
A novel loss function, FLTBNK, is used for training the texture synthesizer.
TraPHic: Trajectory Prediction in Dense and Heterogeneous Traffic Using Weighted Interactions
We evaluate the performance of our prediction algorithm, TraPHic, on the standard datasets and also introduce a new dense, heterogeneous traffic dataset corresponding to urban Asian videos and agent trajectories.
 Ranked #1 on
Trajectory Prediction
on TRAF
Ranked #1 on
Trajectory Prediction
on TRAF
 Trajectory Prediction
Robotics
Trajectory Prediction
Robotics
RoadTrack: Realtime Tracking of Road Agents in Dense and Heterogeneous Environments
We present a realtime tracking algorithm, RoadTrack, to track heterogeneous road-agents in dense traffic videos.
Robotics
RobustTP: End-to-End Trajectory Prediction for Heterogeneous Road-Agents in Dense Traffic with Noisy Sensor Inputs
RobustTP is an approach that first computes trajectories using a combination of a non-linear motion model and a deep learning-based instance segmentation algorithm.
Robotics
STEP: Spatial Temporal Graph Convolutional Networks for Emotion Perception from Gaits
We use hundreds of annotated real-world gait videos and augment them with thousands of annotated synthetic gaits generated using a novel generative network called STEP-Gen, built on an ST-GCN based Conditional Variational Autoencoder (CVAE).

M3ER: Multiplicative Multimodal Emotion Recognition Using Facial, Textual, and Speech Cues
Our approach combines cues from multiple co-occurring modalities (such as face, text, and speech) and also is more robust than other methods to sensor noise in any of the individual modalities.
Take an Emotion Walk: Perceiving Emotions from Gaits Using Hierarchical Attention Pooling and Affective Mapping
For the annotated data, we also train a classifier to map the latent embeddings to emotion labels.

Forecasting Trajectory and Behavior of Road-Agents Using Spectral Clustering in Graph-LSTMs
In practice, our approach reduces the average prediction error by more than 54% over prior algorithms and achieves a weighted average accuracy of 91. 2% for behavior prediction.
 Ranked #1 on
Trajectory Prediction
on ApolloScape
Ranked #1 on
Trajectory Prediction
on ApolloScape
Robotics
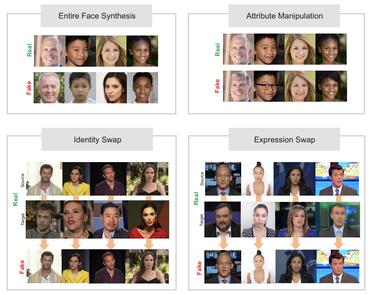
Emotions Don't Lie: An Audio-Visual Deepfake Detection Method Using Affective Cues
Additionally, we extract and compare affective cues corresponding to perceived emotion from the two modalities within a video to infer whether the input video is "real" or "fake".

EmotiCon: Context-Aware Multimodal Emotion Recognition using Frege's Principle
We report an AP of 65. 83 across 4 categories on GroupWalk, which is also an improvement over prior methods.
 Ranked #2 on
Emotion Recognition in Context
on CAER
Ranked #2 on
Emotion Recognition in Context
on CAER
Emotion Recognition in Context
Multimodal Emotion Recognition
BoMuDANet: Unsupervised Adaptation for Visual Scene Understanding in Unstructured Driving Environments
We present an unsupervised adaptation approach for visual scene understanding in unstructured traffic environments.

B-GAP: Behavior-Rich Simulation and Navigation for Autonomous Driving
We address the problem of ego-vehicle navigation in dense simulated traffic environments populated by road agents with varying driver behaviors.
Robotics
SS-SFDA : Self-Supervised Source-Free Domain Adaptation for Road Segmentation in Hazardous Environments
We present a novel approach for unsupervised road segmentation in adverse weather conditions such as rain or fog.

GANav: Efficient Terrain Segmentation for Robot Navigation in Unstructured Outdoor Environments
We interface GANav with a deep reinforcement learning-based navigation algorithm and highlight its benefits in terms of navigation in real-world unstructured terrains.
 Ranked #1 on
Semantic Segmentation
on RUGD
Ranked #1 on
Semantic Segmentation
on RUGD
M3DeTR: Multi-representation, Multi-scale, Mutual-relation 3D Object Detection with Transformers
We present a novel architecture for 3D object detection, M3DeTR, which combines different point cloud representations (raw, voxels, bird-eye view) with different feature scales based on multi-scale feature pyramids.
 Ranked #1 on
3D Object Detection
on KITTI Cars Hard val
Ranked #1 on
3D Object Detection
on KITTI Cars Hard val

METEOR:A Dense, Heterogeneous, and Unstructured Traffic Dataset With Rare Behaviors
We present a new traffic dataset, METEOR, which captures traffic patterns and multi-agent driving behaviors in unstructured scenarios.

SOCIALMAPF: Optimal and Efficient Multi-Agent Path Finding with Strategic Agents for Social Navigation
We perform an extensive array of experiments that show that optimal search-based MAPF techniques lead to collisions and increased time-to-goal in SocialMAPF compared to our proposed method using mechanism design.

SOCIALGYM 2.0: Simulator for Multi-Agent Social Robot Navigation in Shared Human Spaces
We present SocialGym 2, a multi-agent navigation simulator for social robot research.
iPLAN: Intent-Aware Planning in Heterogeneous Traffic via Distributed Multi-Agent Reinforcement Learning
Our approach for intent-aware planning, iPLAN, allows agents to infer nearby drivers' intents solely from their local observations.
Decentralized Social Navigation with Non-Cooperative Robots via Bi-Level Optimization
This paper presents a fully decentralized approach for realtime non-cooperative multi-robot navigation in social mini-games, such as navigating through a narrow doorway or negotiating right of way at a corridor intersection.
Principles and Guidelines for Evaluating Social Robot Navigation Algorithms
A major challenge to deploying robots widely is navigation in human-populated environments, commonly referred to as social robot navigation.
Disturbance Observer-based Robust Integral Control Barrier Functions for Nonlinear Systems with High Relative Degree
Towards this aim, we first construct a governing augmented state space model consisting of the equations of motion of the original system, the integral control law and the nonlinear disturbance observer.
Neural Differentiable Integral Control Barrier Functions for Unknown Nonlinear Systems with Input Constraints
In this paper, we propose a deep learning based control synthesis framework for fast and online computation of controllers that guarantees the safety of general nonlinear control systems with unknown dynamics in the presence of input constraints.
