Search Results for author:
Found 39 papers, 13 papers with code
DNNVM : End-to-End Compiler Leveraging Heterogeneous Optimizations on FPGA-based CNN Accelerators
On the Xilinx ZU2 @330 MHz and ZU9 @330 MHz, we achieve equivalently state-of-the-art performance on our benchmarks by na\"ive implementations without optimizations, and the throughput is further improved up to 1. 26x by leveraging heterogeneous optimizations in DNNVM.
Integral Human Pose Regression
State-of-the-art human pose estimation methods are based on heat map representation.
 Ranked #23 on
Pose Estimation
on MPII Human Pose
Ranked #23 on
Pose Estimation
on MPII Human Pose


Compositional Human Pose Regression
A central problem is that the structural information in the pose is not well exploited in the previous regression methods.
Ranked #36 on
Pose Estimation
on MPII Human Pose
Evaluating Efficient Performance Estimators of Neural Architectures
Conducting efficient performance estimations of neural architectures is a major challenge in neural architecture search (NAS).

aw_nas: A Modularized and Extensible NAS framework
Neural Architecture Search (NAS) has received extensive attention due to its capability to discover neural network architectures in an automated manner.

Described Object Detection: Liberating Object Detection with Flexible Expressions
In this paper, we advance them to a more practical setting called Described Object Detection (DOD) by expanding category names to flexible language expressions for OVD and overcoming the limitation of REC only grounding the pre-existing object.

Category Query Learning for Human-Object Interaction Classification
Unlike most previous HOI methods that focus on learning better human-object features, we propose a novel and complementary approach called category query learning.
 Ranked #8 on
Human-Object Interaction Detection
on HICO-DET
Ranked #8 on
Human-Object Interaction Detection
on HICO-DET

Adversarial samples for deep monocular 6D object pose estimation
We also introduce a new U6DA-Linemod dataset for robustness study of the 6D pose estimation task.


Gan-Based Joint Activity Detection and Channel Estimation For Grant-free Random Access
Joint activity detection and channel estimation (JADCE) for grant-free random access is a critical issue that needs to be addressed to support massive connectivity in IoT networks.

Decoupling Meta-Reinforcement Learning with Gaussian Task Contexts and Skills
We propose a framework called decoupled meta-reinforcement learning (DCMRL), which (1) contrastively restricts the learning of task contexts through pulling in similar task contexts within the same task and pushing away different task contexts of different tasks, and (2) utilizes a Gaussian quantization variational autoencoder (GQ-VAE) for clustering the Gaussian distributions of the task contexts and skills respectively, and decoupling the exploration and learning processes of their spaces.
Step by step: a hierarchical framework for multi-hop knowledge graph reasoning with reinforcement learning
Due to this one-to-many dilemma, enlarged action space and ignoring logical relationship between entity and relation increase the difficulty of learning.
Temporal knowledge graph representation learning with local and global evolutions
Temporal knowledge graph (TKG) representation learning aims to project entities and relations in TKG to low-dimensional vector space while preserving the evolutionary nature of TKG.
Enhancing Molecular Property Prediction via Mixture of Collaborative Experts
To address data scarcity and imbalance in MPP, some studies have adopted Graph Neural Networks (GNN) as an encoder to extract commonalities from molecular graphs.
Pseudo Mask Augmented Object Detection
In this work, we present a novel and effective framework to facilitate object detection with the instance-level segmentation information that is only supervised by bounding box annotation.

Deep Kinematic Pose Regression
In this work, we propose to directly embed a kinematic object model into the deep neutral network learning for general articulated object pose estimation.
 Ranked #307 on
3D Human Pose Estimation
on Human3.6M
Ranked #307 on
3D Human Pose Estimation
on Human3.6M
Attribute Recognition from Adaptive Parts
Previous part-based attribute recognition approaches perform part detection and attribute recognition in separate steps.
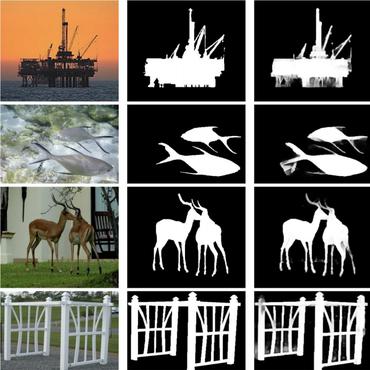
Saliency Optimization from Robust Background Detection
However, their usage of boundary prior is very simple, fragile, and the integration with other cues is mostly heuristic.
Cascaded Hand Pose Regression
We extends the previous 2D cascaded object pose regression work [9] in two aspects so that it works better for 3D articulated objects.

Object Proposal by Multi-Branch Hierarchical Segmentation
Hierarchical segmentation based object proposal methods have become an important step in modern object detection paradigm.
3D Dense Face Alignment via Graph Convolution Networks
Recently, 3D face reconstruction and face alignment tasks are gradually combined into one task: 3D dense face alignment.


BARS: Joint Search of Cell Topology and Layout for Accurate and Efficient Binary ARchitectures
We also design the micro-level search space to strengthen the information flow for BNN.
Hardware Accelerator for Multi-Head Attention and Position-Wise Feed-Forward in the Transformer
Designing hardware accelerators for deep neural networks (DNNs) has been much desired.
Realizing Majorana fermion modes in the Kitaev model
We study the possibility to realize Majorana zero mode that's robust and may be easily manipulated for braiding in quantum computing in the ground state of the Kitaev model in this work.
Strongly Correlated Electrons
A hybrid deep learning framework for Covid-19 detection via 3D Chest CT Images
In this paper, we present a hybrid deep learning framework named CTNet which combines convolutional neural network and transformer together for the detection of COVID-19 via 3D chest CT images.

One-step, Wash-free, Nanoparticle Clustering-based Magnetic Particle Spectroscopy (MPS) Bioassay Method for Detection of SARS-CoV-2 Spike and Nucleocapsid Proteins in Liquid Phase
With the ongoing global pandemic of coronavirus disease 2019 (COVID-19), there is an increasing quest for more accessible, easy-to-use, rapid, inexpensive, and high accuracy diagnostic tools.
Sparse Signal Processing for Massive Connectivity via Mixed-Integer Programming
Although an enhanced estimation performance in terms of the mean squared error (MSE) can be achieved, the weighted $l_1$-norm minimization algorithm is still a convex relaxation of the original group-sparse matrix estimation problem, yielding a suboptimal solution.
A Surgery of the Neural Architecture Evaluators
A major challenge in NAS is to conduct a fast and accurate evaluation of neural architectures.
Multi-Agent Vulnerability Discovery for Autonomous Driving with Hazard Arbitration Reward
These scenarios indeed correspond to the vulnerabilities of the under-test driving policies, thus are meaningful for their further improvements.

Bio-Inspired Feature Selection in Brain Disease Detection via an Improved Sparrow Search Algorithm
Finally, the proposed ISSA is utilized to solve the objective function.

EgoVM: Achieving Precise Ego-Localization using Lightweight Vectorized Maps
The experimental results show that our method achieves centimeter-level localization accuracy, and outperforms existing methods using vectorized maps by a large margin.

Compositional Learning in Transformer-Based Human-Object Interaction Detection
Human-object interaction (HOI) detection is an important part of understanding human activities and visual scenes.
Uncertainty-Aware Cross-Modal Transfer Network for Sketch-Based 3D Shape Retrieval
UACTN decouples the representation learning of sketches and 3D shapes into two separate tasks: classification-based sketch uncertainty learning and 3D shape feature transfer.

UAV Swarm-enabled Collaborative Secure Relay Communications with Time-domain Colluding Eavesdropper
Unmanned aerial vehicles (UAVs) as aerial relays are practically appealing for assisting Internet of Things (IoT) network.
Joint Scheduling and Trajectory Optimization of Charging UAV in Wireless Rechargeable Sensor Networks
Wireless rechargeable sensor networks with a charging unmanned aerial vehicle (CUAV) have the broad application prospects in the power supply of the rechargeable sensor nodes (SNs).
Joint Power and 3D Trajectory Optimization for UAV-enabled Wireless Powered Communication Networks with Obstacles
For UTTOP, we first introduce a pretreatment method, and then use an improved particle swarm optimization with Normal distribution initialization, Genetic mechanism, Differential mechanism and Pursuit operator (PSO-NGDP) to deal with this sub optimization problem.
Joint Task Offloading and Resource Allocation in Aerial-Terrestrial UAV Networks with Edge and Fog Computing for Post-Disaster Rescue
Unmanned aerial vehicles (UAVs) play an increasingly important role in assisting fast-response post-disaster rescue due to their fast deployment, flexible mobility, and low cost.
TJCCT: A Two-timescale Approach for UAV-assisted Mobile Edge Computing
Since the problem is a non-convex and NP-hard mixed integer nonlinear programming (MINLP), we propose a two-timescale joint computing resource allocation, computation offloading, and trajectory control (TJCCT) approach for solving the problem.
A Two Time-Scale Joint Optimization Approach for UAV-assisted MEC
In the short time scale, we propose a price-incentive method for on-demand computing resource allocation and a matching mechanism-based method for computation offloading.
UAV-enabled Collaborative Beamforming via Multi-Agent Deep Reinforcement Learning
To improve the work efficiency of the UVAA, we formulate a UAV-enabled collaborative beamforming multi-objective optimization problem (UCBMOP) to simultaneously maximize the transmission rate of the UVAA and minimize the energy consumption of all UAVs by optimizing the positions and excitation current weights of all UAVs.
