Search Results for author:
Found 23 papers, 14 papers with code
Learning to Segment Instances in Videos with Spatial Propagation Network
In addition, we apply a filter on the refined score map that aims to recognize the best connected region using spatial and temporal consistencies in the video.
Scene Parsing with Global Context Embedding
We present a scene parsing method that utilizes global context information based on both the parametric and non- parametric models.
Adversarial Learning for Semi-Supervised Semantic Segmentation
We propose a method for semi-supervised semantic segmentation using an adversarial network.


Learning to Adapt Structured Output Space for Semantic Segmentation
In this paper, we propose an adversarial learning method for domain adaptation in the context of semantic segmentation.
 Ranked #3 on
Domain Adaptation
on Synscapes-to-Cityscapes
Ranked #3 on
Domain Adaptation
on Synscapes-to-Cityscapes




Learning to Blend Photos
Specifically, given a foreground image and a background image, our proposed method automatically generates a set of blending photos with scores that indicate the aesthetics quality with the proposed quality network and policy network.
SCOPS: Self-Supervised Co-Part Segmentation
Parts provide a good intermediate representation of objects that is robust with respect to the camera, pose and appearance variations.
 Ranked #4 on
Unsupervised Keypoint Estimation
on CUB
Ranked #4 on
Unsupervised Keypoint Estimation
on CUB
Weakly-supervised Caricature Face Parsing through Domain Adaptation
However, current state-of-the-art face parsing methods require large amounts of labeled data on the pixel-level and such process for caricature is tedious and labor-intensive.
Progressive Domain Adaptation for Object Detection
This intermediate domain is constructed by translating the source images to mimic the ones in the target domain.
From Image Collections to Point Clouds with Self-supervised Shape and Pose Networks
We learn both 3D point cloud reconstruction and pose estimation networks in a self-supervised manner, making use of differentiable point cloud renderer to train with 2D supervision.
 3D Object Reconstruction From A Single Image
3D Object Reconstruction From A Single Image
 3D Point Cloud Reconstruction
+2
3D Point Cloud Reconstruction
+2
Weakly-Supervised Semantic Segmentation via Sub-category Exploration
Existing weakly-supervised semantic segmentation methods using image-level annotations typically rely on initial responses to locate object regions.


Mixup-CAM: Weakly-supervised Semantic Segmentation via Uncertainty Regularization
Obtaining object response maps is one important step to achieve weakly-supervised semantic segmentation using image-level labels.


Learning to Caricature via Semantic Shape Transform
Caricature is an artistic drawing created to abstract or exaggerate facial features of a person.
SoDA: Multi-Object Tracking with Soft Data Association
Robust multi-object tracking (MOT) is a prerequisite fora safe deployment of self-driving cars.

Incremental False Negative Detection for Contrastive Learning
Self-supervised learning has recently shown great potential in vision tasks through contrastive learning, which aims to discriminate each image, or instance, in the dataset.


Simple Training Strategies and Model Scaling for Object Detection
We benchmark these improvements on the vanilla ResNet-FPN backbone with RetinaNet and RCNN detectors.
 Ranked #57 on
Object Detection
on COCO minival
Ranked #57 on
Object Detection
on COCO minival

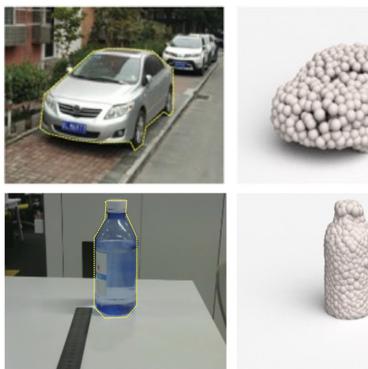
Discovering 3D Parts from Image Collections
Reasoning 3D shapes from 2D images is an essential yet challenging task, especially when only single-view images are at our disposal.
Semi-supervised Multi-task Learning for Semantics and Depth
Multi-Task Learning (MTL) aims to enhance the model generalization by sharing representations between related tasks for better performance.


LET-3D-AP: Longitudinal Error Tolerant 3D Average Precision for Camera-Only 3D Detection
The popular object detection metric 3D Average Precision (3D AP) relies on the intersection over union between predicted bounding boxes and ground truth bounding boxes.

LASSIE: Learning Articulated Shapes from Sparse Image Ensemble via 3D Part Discovery
In this work, we propose a practical problem setting to estimate 3D pose and shape of animals given only a few (10-30) in-the-wild images of a particular animal species (say, horse).
Optimizing Anchor-based Detectors for Autonomous Driving Scenes
This paper summarizes model improvements and inference-time optimizations for the popular anchor-based detectors in the scenes of autonomous driving.
Hi-LASSIE: High-Fidelity Articulated Shape and Skeleton Discovery from Sparse Image Ensemble
Automatically estimating 3D skeleton, shape, camera viewpoints, and part articulation from sparse in-the-wild image ensembles is a severely under-constrained and challenging problem.
3D Open-Vocabulary Panoptic Segmentation with 2D-3D Vision-Language Distillation
3D panoptic segmentation is a challenging perception task, especially in autonomous driving.
