Search Results for author:
Found 75 papers, 58 papers with code
Segment Anything
We introduce the Segment Anything (SA) project: a new task, model, and dataset for image segmentation.
 Ranked #2 on
Zero-Shot Instance Segmentation
on LVIS v1.0 val
Ranked #2 on
Zero-Shot Instance Segmentation
on LVIS v1.0 val
The effectiveness of MAE pre-pretraining for billion-scale pretraining
While MAE has only been shown to scale with the size of models, we find that it scales with the size of the training dataset as well.
 Ranked #1 on
Few-Shot Image Classification
on ImageNet - 10-shot
(using extra training data)
Ranked #1 on
Few-Shot Image Classification
on ImageNet - 10-shot
(using extra training data)


Exploring Plain Vision Transformer Backbones for Object Detection
This design enables the original ViT architecture to be fine-tuned for object detection without needing to redesign a hierarchical backbone for pre-training.
 Ranked #5 on
Instance Segmentation
on LVIS v1.0 val
Ranked #5 on
Instance Segmentation
on LVIS v1.0 val

Revisiting Weakly Supervised Pre-Training of Visual Perception Models
Model pre-training is a cornerstone of modern visual recognition systems.
 Ranked #1 on
Out-of-Distribution Generalization
on ImageNet-W
(using extra training data)
Ranked #1 on
Out-of-Distribution Generalization
on ImageNet-W
(using extra training data)
 Fine-Grained Image Classification
Fine-Grained Image Classification
 Out-of-Distribution Generalization
+3
Out-of-Distribution Generalization
+3
Benchmarking Detection Transfer Learning with Vision Transformers
The complexity of object detection methods can make this benchmarking non-trivial when new architectures, such as Vision Transformer (ViT) models, arrive.
PyTorchVideo: A Deep Learning Library for Video Understanding
We introduce PyTorchVideo, an open-source deep-learning library that provides a rich set of modular, efficient, and reproducible components for a variety of video understanding tasks, including classification, detection, self-supervised learning, and low-level processing.

Masked Autoencoders Are Scalable Vision Learners
Our MAE approach is simple: we mask random patches of the input image and reconstruct the missing pixels.
Ranked #1 on
Out-of-Distribution Generalization
on ImageNet-W
Early Convolutions Help Transformers See Better
To test whether this atypical design choice causes an issue, we analyze the optimization behavior of ViT models with their original patchify stem versus a simple counterpart where we replace the ViT stem by a small number of stacked stride-two 3*3 convolutions.
A Large-Scale Study on Unsupervised Spatiotemporal Representation Learning
We present a large-scale study on unsupervised spatiotemporal representation learning from videos.
 Ranked #3 on
Self-Supervised Action Recognition
on HMDB51
Ranked #3 on
Self-Supervised Action Recognition
on HMDB51
 Representation Learning
Self-Supervised Action Recognition
+1
Representation Learning
Self-Supervised Action Recognition
+1
Boundary IoU: Improving Object-Centric Image Segmentation Evaluation
We perform an extensive analysis across different error types and object sizes and show that Boundary IoU is significantly more sensitive than the standard Mask IoU measure to boundary errors for large objects and does not over-penalize errors on smaller objects.
Fast and Accurate Model Scaling
This leads us to propose a simple fast compound scaling strategy that encourages primarily scaling model width, while scaling depth and resolution to a lesser extent.
Evaluating Large-Vocabulary Object Detectors: The Devil is in the Details
On one hand, this is desirable as it treats all classes equally.
Large scale weakly and semi-supervised learning for low-resource video ASR
Many semi- and weakly-supervised approaches have been investigated for overcoming the labeling cost of building high quality speech recognition systems.
Designing Network Design Spaces
In this work, we present a new network design paradigm.
Ranked #1 on
Out-of-Distribution Generalization
on ImageNet-W

Are Labels Necessary for Neural Architecture Search?
Existing neural network architectures in computer vision -- whether designed by humans or by machines -- were typically found using both images and their associated labels.

Improved Baselines with Momentum Contrastive Learning
Contrastive unsupervised learning has recently shown encouraging progress, e. g., in Momentum Contrast (MoCo) and SimCLR.
 Ranked #3 on
Contrastive Learning
on imagenet-1k
Ranked #3 on
Contrastive Learning
on imagenet-1k


PointRend: Image Segmentation as Rendering
We present a new method for efficient high-quality image segmentation of objects and scenes.
 Ranked #3 on
Instance Segmentation
on COCO 2017 val
Ranked #3 on
Instance Segmentation
on COCO 2017 val
A Multigrid Method for Efficiently Training Video Models
We empirically demonstrate a general and robust grid schedule that yields a significant out-of-the-box training speedup without a loss in accuracy for different models (I3D, non-local, SlowFast), datasets (Kinetics, Something-Something, Charades), and training settings (with and without pre-training, 128 GPUs or 1 GPU).
 Ranked #1 on
Video Classification
on Kinetics
Ranked #1 on
Video Classification
on Kinetics

Momentum Contrast for Unsupervised Visual Representation Learning
This enables building a large and consistent dictionary on-the-fly that facilitates contrastive unsupervised learning.
Ranked #11 on
Contrastive Learning
on imagenet-1k
Training ASR models by Generation of Contextual Information
Supervised ASR models have reached unprecedented levels of accuracy, thanks in part to ever-increasing amounts of labelled training data.
PHYRE: A New Benchmark for Physical Reasoning
The benchmark is designed to encourage the development of learning algorithms that are sample-efficient and generalize well across puzzles.
 Ranked #3 on
Visual Reasoning
on PHYRE-1B-Within
Ranked #3 on
Visual Reasoning
on PHYRE-1B-Within
LVIS: A Dataset for Large Vocabulary Instance Segmentation
We plan to collect ~2 million high-quality instance segmentation masks for over 1000 entry-level object categories in 164k images.
Exploring Randomly Wired Neural Networks for Image Recognition
In this paper, we explore a more diverse set of connectivity patterns through the lens of randomly wired neural networks.
 Ranked #118 on
Neural Architecture Search
on <h2>oi</h2>
Ranked #118 on
Neural Architecture Search
on <h2>oi</h2>
TensorMask: A Foundation for Dense Object Segmentation
To formalize this, we treat dense instance segmentation as a prediction task over 4D tensors and present a general framework called TensorMask that explicitly captures this geometry and enables novel operators on 4D tensors.
 Ranked #90 on
Instance Segmentation
on COCO test-dev
Ranked #90 on
Instance Segmentation
on COCO test-dev
Panoptic Feature Pyramid Networks
In this work, we perform a detailed study of this minimally extended version of Mask R-CNN with FPN, which we refer to as Panoptic FPN, and show it is a robust and accurate baseline for both tasks.
 Ranked #4 on
Panoptic Segmentation
on Indian Driving Dataset
Ranked #4 on
Panoptic Segmentation
on Indian Driving Dataset

Long-Term Feature Banks for Detailed Video Understanding
To understand the world, we humans constantly need to relate the present to the past, and put events in context.
 Ranked #4 on
Egocentric Activity Recognition
on EPIC-KITCHENS-55
Ranked #4 on
Egocentric Activity Recognition
on EPIC-KITCHENS-55
Rethinking ImageNet Pre-training
We report competitive results on object detection and instance segmentation on the COCO dataset using standard models trained from random initialization.
 Ranked #81 on
Object Detection
on COCO minival
Ranked #81 on
Object Detection
on COCO minival
Exploring the Limits of Weakly Supervised Pretraining
ImageNet classification is the de facto pretraining task for these models.
 Ranked #222 on
Image Classification
on <h2>oi</h2>
(using extra training data)
Ranked #222 on
Image Classification
on <h2>oi</h2>
(using extra training data)

Low-Shot Learning from Imaginary Data
Humans can quickly learn new visual concepts, perhaps because they can easily visualize or imagine what novel objects look like from different views.
Panoptic Segmentation
We propose and study a task we name panoptic segmentation (PS).
 Ranked #23 on
Panoptic Segmentation
on Cityscapes val
(using extra training data)
Ranked #23 on
Panoptic Segmentation
on Cityscapes val
(using extra training data)
Data Distillation: Towards Omni-Supervised Learning
We investigate omni-supervised learning, a special regime of semi-supervised learning in which the learner exploits all available labeled data plus internet-scale sources of unlabeled data.

Learning by Asking Questions
We also show that our model asks questions that generalize to state-of-the-art VQA models and to novel test time distributions.

Learning to Segment Every Thing
Most methods for object instance segmentation require all training examples to be labeled with segmentation masks.
Non-local Neural Networks
Both convolutional and recurrent operations are building blocks that process one local neighborhood at a time.
 Ranked #8 on
Action Classification
on Toyota Smarthome dataset
(using extra training data)
Ranked #8 on
Action Classification
on Toyota Smarthome dataset
(using extra training data)
Focal Loss for Dense Object Detection
Our novel Focal Loss focuses training on a sparse set of hard examples and prevents the vast number of easy negatives from overwhelming the detector during training.
 Ranked #3 on
Region Proposal
on COCO test-dev
Ranked #3 on
Region Proposal
on COCO test-dev
Accurate, Large Minibatch SGD: Training ImageNet in 1 Hour
To achieve this result, we adopt a hyper-parameter-free linear scaling rule for adjusting learning rates as a function of minibatch size and develop a new warmup scheme that overcomes optimization challenges early in training.
Inferring and Executing Programs for Visual Reasoning
Existing methods for visual reasoning attempt to directly map inputs to outputs using black-box architectures without explicitly modeling the underlying reasoning processes.
 Ranked #5 on
Visual Question Answering (VQA)
on CLEVR-Humans
Ranked #5 on
Visual Question Answering (VQA)
on CLEVR-Humans

Detecting and Recognizing Human-Object Interactions
Our hypothesis is that the appearance of a person -- their pose, clothing, action -- is a powerful cue for localizing the objects they are interacting with.
 Ranked #53 on
Human-Object Interaction Detection
on HICO-DET
Ranked #53 on
Human-Object Interaction Detection
on HICO-DET
Mask R-CNN
Our approach efficiently detects objects in an image while simultaneously generating a high-quality segmentation mask for each instance.
 Ranked #1 on
Keypoint Estimation
on GRIT
Ranked #1 on
Keypoint Estimation
on GRIT

CLEVR: A Diagnostic Dataset for Compositional Language and Elementary Visual Reasoning
When building artificial intelligence systems that can reason and answer questions about visual data, we need diagnostic tests to analyze our progress and discover shortcomings.
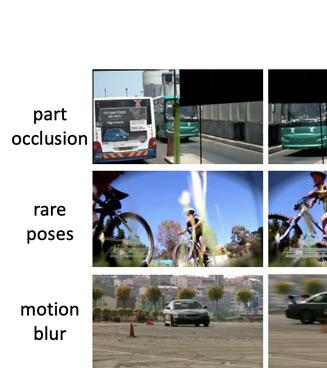
Learning Features by Watching Objects Move
Given the extensive evidence that motion plays a key role in the development of the human visual system, we hope that this straightforward approach to unsupervised learning will be more effective than cleverly designed 'pretext' tasks studied in the literature.

Feature Pyramid Networks for Object Detection
Feature pyramids are a basic component in recognition systems for detecting objects at different scales.
 Ranked #3 on
Pedestrian Detection
on TJU-Ped-campus
Ranked #3 on
Pedestrian Detection
on TJU-Ped-campus
Aggregated Residual Transformations for Deep Neural Networks
Our simple design results in a homogeneous, multi-branch architecture that has only a few hyper-parameters to set.
 Ranked #3 on
Image Classification
on GasHisSDB
Ranked #3 on
Image Classification
on GasHisSDB
Low-shot Visual Recognition by Shrinking and Hallucinating Features
Low-shot visual learning---the ability to recognize novel object categories from very few examples---is a hallmark of human visual intelligence.


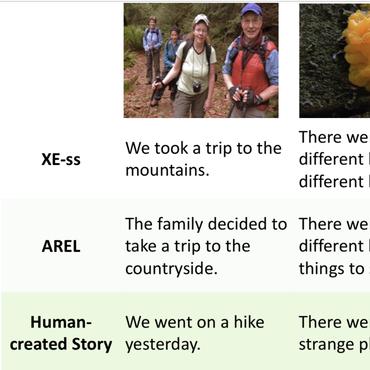
Visual Storytelling
We introduce the first dataset for sequential vision-to-language, and explore how this data may be used for the task of visual storytelling.
Deep3D: Fully Automatic 2D-to-3D Video Conversion with Deep Convolutional Neural Networks
As 3D movie viewing becomes mainstream and Virtual Reality (VR) market emerges, the demand for 3D contents is growing rapidly.

Training Region-based Object Detectors with Online Hard Example Mining
Our motivation is the same as it has always been -- detection datasets contain an overwhelming number of easy examples and a small number of hard examples.
 Ranked #6 on
Face Verification
on Trillion Pairs Dataset
Ranked #6 on
Face Verification
on Trillion Pairs Dataset
Seeing through the Human Reporting Bias: Visual Classifiers from Noisy Human-Centric Labels
When human annotators are given a choice about what to label in an image, they apply their own subjective judgments on what to ignore and what to mention.

Inside-Outside Net: Detecting Objects in Context with Skip Pooling and Recurrent Neural Networks
In this paper we present the Inside-Outside Net (ION), an object detector that exploits information both inside and outside the region of interest.
 Ranked #224 on
Object Detection
on COCO test-dev
Ranked #224 on
Object Detection
on COCO test-dev
Reducing Overfitting in Deep Networks by Decorrelating Representations
One major challenge in training Deep Neural Networks is preventing overfitting.
Unsupervised Deep Embedding for Clustering Analysis
Clustering is central to many data-driven application domains and has been studied extensively in terms of distance functions and grouping algorithms.
 Ranked #4 on
Unsupervised Image Classification
on SVHN
(using extra training data)
Ranked #4 on
Unsupervised Image Classification
on SVHN
(using extra training data)


You Only Look Once: Unified, Real-Time Object Detection
A single neural network predicts bounding boxes and class probabilities directly from full images in one evaluation.
 Ranked #1 on
Real-Time Object Detection
on PASCAL VOC 2007
Ranked #1 on
Real-Time Object Detection
on PASCAL VOC 2007
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
In this work, we introduce a Region Proposal Network (RPN) that shares full-image convolutional features with the detection network, thus enabling nearly cost-free region proposals.
 Ranked #2 on
Vessel Detection
on Vessel detection Dateset
Ranked #2 on
Vessel Detection
on Vessel detection Dateset

Aligning 3D Models to RGB-D Images of Cluttered Scenes
The goal of this work is to represent objects in an RGB-D scene with corresponding 3D models from a library.
Exploring Nearest Neighbor Approaches for Image Captioning
We explore a variety of nearest neighbor baseline approaches for image captioning.
Contextual Action Recognition with R*CNN
In this work, we exploit the simple observation that actions are accompanied by contextual cues to build a strong action recognition system.
 Ranked #4 on
Weakly Supervised Object Detection
on HICO-DET
Ranked #4 on
Weakly Supervised Object Detection
on HICO-DET
Fast R-CNN
Fast R-CNN builds on previous work to efficiently classify object proposals using deep convolutional networks.
 Ranked #23 on
Object Detection
on PASCAL VOC 2007
(using extra training data)
Ranked #23 on
Object Detection
on PASCAL VOC 2007
(using extra training data)
Object Detection Networks on Convolutional Feature Maps
We discover that aside from deep feature maps, a deep and convolutional per-region classifier is of particular importance for object detection, whereas latest superior image classification models (such as ResNets and GoogLeNets) do not directly lead to good detection accuracy without using such a per-region classifier.
Inferring 3D Object Pose in RGB-D Images
The goal of this work is to replace objects in an RGB-D scene with corresponding 3D models from a library.
Actions and Attributes from Wholes and Parts
We investigate the importance of parts for the tasks of action and attribute classification.

Hypercolumns for Object Segmentation and Fine-grained Localization
Recognition algorithms based on convolutional networks (CNNs) typically use the output of the last layer as feature representation.

Deformable Part Models are Convolutional Neural Networks
Deformable part models (DPMs) and convolutional neural networks (CNNs) are two widely used tools for visual recognition.
Ranked #28 on
Object Detection
on PASCAL VOC 2007
Learning Rich Features from RGB-D Images for Object Detection and Segmentation
In this paper we study the problem of object detection for RGB-D images using semantically rich image and depth features.
 Ranked #6 on
Object Detection In Indoor Scenes
on SUN RGB-D
Ranked #6 on
Object Detection In Indoor Scenes
on SUN RGB-D
LSDA: Large Scale Detection Through Adaptation
A major challenge in scaling object detection is the difficulty of obtaining labeled images for large numbers of categories.
Part-based R-CNNs for Fine-grained Category Detection
Semantic part localization can facilitate fine-grained categorization by explicitly isolating subtle appearance differences associated with specific object parts.
 Ranked #64 on
Fine-Grained Image Classification
on CUB-200-2011
Ranked #64 on
Fine-Grained Image Classification
on CUB-200-2011
Simultaneous Detection and Segmentation
Unlike classical semantic segmentation, we require individual object instances.
 Ranked #5 on
Object Detection
on PASCAL VOC 2012
Ranked #5 on
Object Detection
on PASCAL VOC 2012
Analyzing the Performance of Multilayer Neural Networks for Object Recognition
In the last two years, convolutional neural networks (CNNs) have achieved an impressive suite of results on standard recognition datasets and tasks.

Caffe: Convolutional Architecture for Fast Feature Embedding
The framework is a BSD-licensed C++ library with Python and MATLAB bindings for training and deploying general-purpose convolutional neural networks and other deep models efficiently on commodity architectures.

R-CNNs for Pose Estimation and Action Detection
We present convolutional neural networks for the tasks of keypoint (pose) prediction and action classification of people in unconstrained images.
Using k-Poselets for Detecting People and Localizing Their Keypoints
A k-poselet is a deformable part model (DPM) with k parts, where each of the parts is a poselet, aligned to a specific configuration of keypoints based on ground-truth annotations.
Understanding Objects in Detail with Fine-Grained Attributes
We show that the collected data can be used to study the relation between part detection and attribute prediction by diagnosing the performance of classifiers that pool information from different parts of an object.
Microsoft COCO: Common Objects in Context
We present a new dataset with the goal of advancing the state-of-the-art in object recognition by placing the question of object recognition in the context of the broader question of scene understanding.
DenseNet: Implementing Efficient ConvNet Descriptor Pyramids
Convolutional Neural Networks (CNNs) can provide accurate object classification.
On learning to localize objects with minimal supervision
Learning to localize objects with minimal supervision is an important problem in computer vision, since large fully annotated datasets are extremely costly to obtain.
 Ranked #35 on
Weakly Supervised Object Detection
on PASCAL VOC 2007
Ranked #35 on
Weakly Supervised Object Detection
on PASCAL VOC 2007
Rich feature hierarchies for accurate object detection and semantic segmentation
We find that R-CNN outperforms OverFeat by a large margin on the 200-class ILSVRC2013 detection dataset.
Ranked #27 on
Object Detection
on PASCAL VOC 2007
(using extra training data)
