Search Results for author:
Found 30 papers, 21 papers with code
StreamFlow: Streamlined Multi-Frame Optical Flow Estimation for Video Sequences
To address this issue, multi-frame optical flow methods leverage adjacent frames to mitigate the local ambiguity.

Mug-STAN: Adapting Image-Language Pretrained Models for General Video Understanding
Large-scale image-language pretrained models, e. g., CLIP, have demonstrated remarkable proficiency in acquiring general multi-modal knowledge through web-scale image-text data.
Efficient Test-Time Adaptation for Super-Resolution with Second-Order Degradation and Reconstruction
Then, we adapt the SR model by implementing feature-level reconstruction learning from the initial test image to its second-order degraded counterparts, which helps the SR model generate plausible HR images.

One For All: Video Conversation is Feasible Without Video Instruction Tuning
Without bells and whistles, BT-Adapter achieves (1) state-of-the-art zero-shot results on various video tasks using thousands of fewer GPU hours.
 Ranked #5 on
Zero-Shot Video Retrieval
on LSMDC
Ranked #5 on
Zero-Shot Video Retrieval
on LSMDC
 Video-based Generative Performance Benchmarking (Consistency)
Video-based Generative Performance Benchmarking (Contextual Understanding)
+6
Video-based Generative Performance Benchmarking (Consistency)
Video-based Generative Performance Benchmarking (Contextual Understanding)
+6
$A^2$Nav: Action-Aware Zero-Shot Robot Navigation by Exploiting Vision-and-Language Ability of Foundation Models
We study the task of zero-shot vision-and-language navigation (ZS-VLN), a practical yet challenging problem in which an agent learns to navigate following a path described by language instructions without requiring any path-instruction annotation data.
Learning Vision-and-Language Navigation from YouTube Videos
In this paper, we propose to learn an agent from these videos by creating a large-scale dataset which comprises reasonable path-instruction pairs from house tour videos and pre-training the agent on it.
Hard Sample Matters a Lot in Zero-Shot Quantization
Nonetheless, we find that the synthetic samples constructed in existing ZSQ methods can be easily fitted by models.
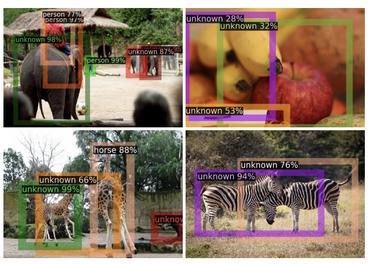
Detecting the open-world objects with the help of the Brain
We propose leveraging the VL as the ``Brain'' of the open-world detector by simply generating unknown labels.
Causality Compensated Attention for Contextual Biased Visual Recognition
Visual attention does not always capture the essential object representation desired for robust predictions.
 Ranked #1 on
Multi-Label Image Classification
on MSCOCO
Ranked #1 on
Multi-Label Image Classification
on MSCOCO
Multi-Label Classification
 Multi-Label Image Classification
+1
Multi-Label Image Classification
+1
Revisiting Temporal Modeling for CLIP-based Image-to-Video Knowledge Transferring
In this paper, based on the CLIP model, we revisit temporal modeling in the context of image-to-video knowledge transferring, which is the key point for extending image-text pretrained models to the video domain.
 Ranked #7 on
Video Retrieval
on MSR-VTT-1kA
(using extra training data)
Ranked #7 on
Video Retrieval
on MSR-VTT-1kA
(using extra training data)

CAT: LoCalization and IdentificAtion Cascade Detection Transformer for Open-World Object Detection
Open-world object detection (OWOD), as a more general and challenging goal, requires the model trained from data on known objects to detect both known and unknown objects and incrementally learn to identify these unknown objects.
Improving Graph Representation for Point Cloud Segmentation via Attentive Filtering
Recently, self-attention networks achieve impressive performance in point cloud segmentation due to their superiority in modeling long-range dependencies.
Learning Active Camera for Multi-Object Navigation
How to make robots perceive the environment as efficiently as humans is a fundamental problem in robotics.
Weakly-Supervised Multi-Granularity Map Learning for Vision-and-Language Navigation
To achieve accurate and efficient navigation, it is critical to build a map that accurately represents both spatial location and the semantic information of the environment objects.
Masked Motion Encoding for Self-Supervised Video Representation Learning
The latest attempts seek to learn a representation model by predicting the appearance contents in the masked regions.
 Ranked #2 on
Self-Supervised Action Recognition
on HMDB51
Ranked #2 on
Self-Supervised Action Recognition
on HMDB51
Frequency-Aware Self-Supervised Monocular Depth Estimation
We present two versatile methods to generally enhance self-supervised monocular depth estimation (MDE) models.

Self-Supervised Monocular Depth Estimation: Solving the Edge-Fattening Problem
In this paper, we redesign the patch-based triplet loss in MDE to alleviate the ubiquitous edge-fattening issue.
 Ranked #1 on
Unsupervised Monocular Depth Estimation
on Kitti Raw
Ranked #1 on
Unsupervised Monocular Depth Estimation
on Kitti Raw

Deep Geometry Post-Processing for Decompressed Point Clouds
Point cloud compression plays a crucial role in reducing the huge cost of data storage and transmission.
Neural Texture Extraction and Distribution for Controllable Person Image Synthesis
Our model is trained to predict human images in arbitrary poses, which encourages it to extract disentangled and expressive neural textures representing the appearance of different semantic entities.

PIRenderer: Controllable Portrait Image Generation via Semantic Neural Rendering
The proposed model can generate photo-realistic portrait images with accurate movements according to intuitive modifications.
Combining Attention with Flow for Person Image Synthesis
Pose-guided person image synthesis aims to synthesize person images by transforming reference images into target poses.
Structure-Transformed Texture-Enhanced Network for Person Image Synthesis
Pose-guided virtual try-on task aims to modify the fashion item based on pose transfer task.
Deep Spatial Transformation for Pose-Guided Person Image Generation and Animation
We show that our framework can spatially transform the inputs in an efficient manner.
Deep Image Spatial Transformation for Person Image Generation
Finally, we warp the source features using a content-aware sampling method with the obtained local attention coefficients.
StructureFlow: Image Inpainting via Structure-aware Appearance Flow
Image inpainting techniques have shown significant improvements by using deep neural networks recently.

Deep AutoEncoder-based Lossy Geometry Compression for Point Clouds
Point cloud is a fundamental 3D representation which is widely used in real world applications such as autonomous driving.

Graph Convolutional Label Noise Cleaner: Train a Plug-and-play Action Classifier for Anomaly Detection
Remarkably, we obtain the frame-level AUC score of 82. 12% on UCF-Crime.

Anomaly Detection In Surveillance Videos
Multiple Instance Learning
+3
Step-by-step Erasion, One-by-one Collection: A Weakly Supervised Temporal Action Detector
Weakly supervised temporal action detection is a Herculean task in understanding untrimmed videos, since no supervisory signal except the video-level category label is available on training data.

Exploiting the Value of the Center-dark Channel Prior for Salient Object Detection
In this paper, we propose a novel salient object detection algorithm for RGB-D images using center-dark channel priors.
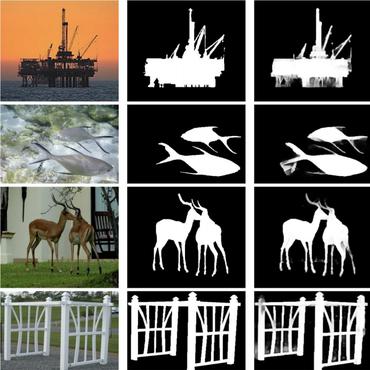
PDNet: Prior-model Guided Depth-enhanced Network for Salient Object Detection
One is the lack of tremendous amount of annotated data to train a network.

