Search Results for author:
Found 88 papers, 23 papers with code
HAMMR: HierArchical MultiModal React agents for generic VQA
We start from a multimodal ReAct-based system and make it hierarchical by enabling our HAMMR agents to call upon other specialized agents.


Grounding Everything: Emerging Localization Properties in Vision-Language Transformers
To leverage those capabilities, we propose a Grounding Everything Module (GEM) that generalizes the idea of value-value attention introduced by CLIPSurgery to a self-self attention path.


Estimating Generic 3D Room Structures from 2D Annotations
Based on these 2D annotations, we automatically reconstruct 3D plane equations for the structural elements and their spatial extent in the scene, and connect adjacent elements at the appropriate contact edges.
CAD-Estate: Large-scale CAD Model Annotation in RGB Videos
We propose a method for annotating videos of complex multi-object scenes with a globally-consistent 3D representation of the objects.

Encyclopedic VQA: Visual questions about detailed properties of fine-grained categories
Empirically, we show that our dataset poses a hard challenge for large vision+language models as they perform poorly on our dataset: PaLI [14] is state-of-the-art on OK-VQA [37], yet it only achieves 13. 0% accuracy on our dataset.
Tracking by 3D Model Estimation of Unknown Objects in Videos
We argue that this representation is limited and instead propose to guide and improve 2D tracking with an explicit object representation, namely the textured 3D shape and 6DoF pose in each video frame.
Agile Modeling: From Concept to Classifier in Minutes
In reaction, we introduce the problem of Agile Modeling: the process of turning any subjective visual concept into a computer vision model through a real-time user-in-the-loop interactions.

Connecting Vision and Language with Video Localized Narratives
We propose Video Localized Narratives, a new form of multimodal video annotations connecting vision and language.

From colouring-in to pointillism: revisiting semantic segmentation supervision
The prevailing paradigm for producing semantic segmentation training data relies on densely labelling each pixel of each image in the training set, akin to colouring-in books.
Multi-View Photometric Stereo Revisited
The proposed approach in this paper exploits the benefit of uncertainty modeling in a deep neural network for a reliable fusion of photometric stereo (PS) and multi-view stereo (MVS) network predictions.

The Missing Link: Finding label relations across datasets
To find relations between labels across datasets, we propose methods based on language, on vision, and on their combination.

How stable are Transferability Metrics evaluations?
Transferability metrics is a maturing field with increasing interest, which aims at providing heuristics for selecting the most suitable source models to transfer to a given target dataset, without fine-tuning them all.

RayTran: 3D pose estimation and shape reconstruction of multiple objects from videos with ray-traced transformers
We propose a transformer-based neural network architecture for multi-object 3D reconstruction from RGB videos.


Uncertainty-Aware Deep Multi-View Photometric Stereo
At each pixel, our approach either selects or discards deep-PS and deep-MVS network prediction depending on the prediction uncertainty measure.
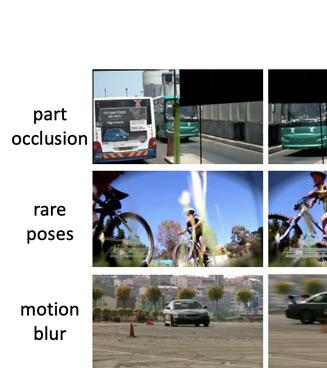
Motion-from-Blur: 3D Shape and Motion Estimation of Motion-blurred Objects in Videos
We propose a method for jointly estimating the 3D motion, 3D shape, and appearance of highly motion-blurred objects from a video.

Urban Radiance Fields
The goal of this work is to perform 3D reconstruction and novel view synthesis from data captured by scanning platforms commonly deployed for world mapping in urban outdoor environments (e. g., Street View).

Transferability Metrics for Selecting Source Model Ensembles
We address the problem of ensemble selection in transfer learning: Given a large pool of source models we want to select an ensemble of models which, after fine-tuning on the target training set, yields the best performance on the target test set.
Transferability Estimation using Bhattacharyya Class Separability
Then, we estimate their pairwise class separability using the Bhattacharyya coefficient, yielding a simple and effective measure of how well the source model transfers to the target task.

Neural Radiance Fields Approach to Deep Multi-View Photometric Stereo
Our method performs neural rendering of multi-view images while utilizing surface normals estimated by a deep photometric stereo network.
Neural Architecture Search for Efficient Uncalibrated Deep Photometric Stereo
We then perform a continuous relaxation of this search space and present a gradient-based optimization strategy to find an efficient light calibration and normal estimation network.

Shape from Blur: Recovering Textured 3D Shape and Motion of Fast Moving Objects
We address the novel task of jointly reconstructing the 3D shape, texture, and motion of an object from a single motion-blurred image.
A Step Toward More Inclusive People Annotations for Fairness
In this paper, we present a new set of annotations on a subset of the Open Images dataset called the MIAP (More Inclusive Annotations for People) subset, containing bounding boxes and attributes for all of the people visible in those images.
Factors of Influence for Transfer Learning across Diverse Appearance Domains and Task Types
Our study leads to several insights and concrete recommendations: (1) for most tasks there exists a source which significantly outperforms ILSVRC'12 pre-training; (2) the image domain is the most important factor for achieving positive transfer; (3) the source dataset should \emph{include} the image domain of the target dataset to achieve best results; (4) at the same time, we observe only small negative effects when the image domain of the source task is much broader than that of the target; (5) transfer across task types can be beneficial, but its success is heavily dependent on both the source and target task types.


ShaRF: Shape-conditioned Radiance Fields from a Single View
We demonstrate in several experiments the effectiveness of our approach in both synthetic and real images.
Telling the What while Pointing to the Where: Multimodal Queries for Image Retrieval
Most existing image retrieval systems use text queries as a way for the user to express what they are looking for.
From Points to Multi-Object 3D Reconstruction
We propose a method to detect and reconstruct multiple 3D objects from a single RGB image.

Uncalibrated Neural Inverse Rendering for Photometric Stereo of General Surfaces
This paper presents an uncalibrated deep neural network framework for the photometric stereo problem.
Vid2CAD: CAD Model Alignment using Multi-View Constraints from Videos
We address the task of aligning CAD models to a video sequence of a complex scene containing multiple objects.
DeFMO: Deblurring and Shape Recovery of Fast Moving Objects
We propose a method that, given a single image with its estimated background, outputs the object's appearance and position in a series of sub-frames as if captured by a high-speed camera (i. e. temporal super-resolution).
 Ranked #1 on
Video Super-Resolution
on Falling Objects
Ranked #1 on
Video Super-Resolution
on Falling Objects

Efficient Full Image Interactive Segmentation by Leveraging Within-image Appearance Similarity
We leverage a key observation: propagation from labeled to unlabeled pixels does not necessarily require class-specific knowledge, but can be done purely based on appearance similarity within an image.
CoReNet: Coherent 3D scene reconstruction from a single RGB image
Furthermore, we adapt our model to address the harder task of reconstructing multiple objects from a single image.

Towards Reusable Network Components by Learning Compatible Representations
This paper proposes to make a first step towards compatible and hence reusable network components.
C-Flow: Conditional Generative Flow Models for Images and 3D Point Clouds
Flow-based generative models have highly desirable properties like exact log-likelihood evaluation and exact latent-variable inference, however they are still in their infancy and have not received as much attention as alternative generative models.
Neural Voxel Renderer: Learning an Accurate and Controllable Rendering Tool
Finally, we show how our neural rendering framework can capture and faithfully render objects from real images and from a diverse set of classes.

Connecting Vision and Language with Localized Narratives
We ask annotators to describe an image with their voice while simultaneously hovering their mouse over the region they are describing.
 Ranked #2 on
Image Captioning
on Localized Narratives
Ranked #2 on
Image Captioning
on Localized Narratives

Training Object Detectors from Few Weakly-Labeled and Many Unlabeled Images
Weakly-supervised object detection attempts to limit the amount of supervision by dispensing the need for bounding boxes, but still assumes image-level labels on the entire training set.
 Ranked #23 on
Weakly Supervised Object Detection
on PASCAL VOC 2012 test
(using extra training data)
Ranked #23 on
Weakly Supervised Object Detection
on PASCAL VOC 2012 test
(using extra training data)
Continuous Adaptation for Interactive Object Segmentation by Learning from Corrections
Our approach enables the adaptation to a particular object and its background, to distributions shifts in a test set, to specific object classes, and even to large domain changes, where the imaging modality changes between training and testing.
 Ranked #1 on
Interactive Segmentation
on DRIONS-DB
Ranked #1 on
Interactive Segmentation
on DRIONS-DB
Panoptic Image Annotation with a Collaborative Assistant
This paper aims to reduce the time to annotate images for panoptic segmentation, which requires annotating segmentation masks and class labels for all object instances and stuff regions.

Natural Vocabulary Emerges from Free-Form Annotations
This vocabulary represents the natural distribution of objects well and is learned directly from data, instead of being an educated guess done before collecting any labels.
Efficient Object Annotation via Speaking and Pointing
We then combine the two stages: annotators draw an object bounding box via the mouse and simultaneously provide its class label via speech.
Large-scale interactive object segmentation with human annotators
Manually annotating object segmentation masks is very time consuming.

Learning single-image 3D reconstruction by generative modelling of shape, pose and shading
Importantly, it can be trained purely from 2D images, without pose annotations, and with only a single view per instance.
Interactive Full Image Segmentation by Considering All Regions Jointly
We propose an interactive, scribble-based annotation framework which operates on the whole image to produce segmentations for all regions.
Fast Object Class Labelling via Speech
Modern approaches rely on a hierarchical organization of the vocabulary to reduce annotation time, but remain expensive (several minutes per image for the 200 classes in ILSVRC).
The Open Images Dataset V4: Unified image classification, object detection, and visual relationship detection at scale
We present Open Images V4, a dataset of 9. 2M images with unified annotations for image classification, object detection and visual relationship detection.

Learning to Generate and Reconstruct 3D Meshes with only 2D Supervision
Importantly, it can be trained purely from 2D images, without ground-truth pose annotations, and with a single view per instance.
Detecting Visual Relationships Using Box Attention
We propose a new model for detecting visual relationships, such as "person riding motorcycle" or "bottle on table".

Fluid Annotation: A Human-Machine Collaboration Interface for Full Image Annotation
As opposed to performing a series of small annotation tasks in isolation, we propose a unified interface for full image annotation in a single pass.
Learning Intelligent Dialogs for Bounding Box Annotation
We demonstrate that (1) our agents are able to learn efficient annotation strategies in several scenarios, automatically adapting to the image difficulty, the desired quality of the boxes, and the detector strength; (2) in all scenarios the resulting annotation dialogs speed up annotation compared to manual box drawing alone and box verification alone, while also outperforming any fixed combination of verification and drawing in most scenarios; (3) in a realistic scenario where the detector is iteratively re-trained, our agents evolve a series of strategies that reflect the shifting trade-off between verification and drawing as the detector grows stronger.
Automatic Generation of Constrained Furniture Layouts
Efficient authoring of vast virtual environments hinges on algorithms that are able to automatically generate content while also being controllable.
Joint Learning of Object and Action Detectors
dog and cat jumping, enabling to detect actions of an object without training with these object-actions pairs.

Active Learning for Human Pose Estimation
Annotating human poses in realistic scenes is very time consuming, yet necessary for training human pose estimators.

Revisiting knowledge transfer for training object class detectors
We propose to revisit knowledge transfer for training object detectors on target classes from weakly supervised training images, helped by a set of source classes with bounding-box annotations.
Extreme clicking for efficient object annotation
We crowd-source extreme point annotations for PASCAL VOC 2007 and 2012 and show that (1) annotation time is only 7s per box, 5x faster than the traditional way of drawing boxes [62]; (2) the quality of the boxes is as good as the original ground-truth drawn the traditional way; (3) detectors trained on our annotations are as accurate as those trained on the original ground-truth.
The Devil is in the Decoder: Classification, Regression and GANs
Many machine vision applications, such as semantic segmentation and depth prediction, require predictions for every pixel of the input image.
How hard can it be? Estimating the difficulty of visual search in an image
We address the problem of estimating image difficulty defined as the human response time for solving a visual search task.
Action Tubelet Detector for Spatio-Temporal Action Localization
We propose the ACtion Tubelet detector (ACT-detector) that takes as input a sequence of frames and outputs tubelets, i. e., sequences of bounding boxes with associated scores.
 Spatio-Temporal Action Localization
Spatio-Temporal Action Localization
 Temporal Action Localization
Temporal Action Localization
Training object class detectors with click supervision
Training object class detectors typically requires a large set of images with objects annotated by bounding boxes.
Objects as context for detecting their semantic parts
We present a semantic part detection approach that effectively leverages object information. We use the object appearance and its class as indicators of what parts to expect.
Weakly Supervised Object Localization Using Things and Stuff Transfer
We propose to help weakly supervised object localization for classes where location annotations are not available, by transferring things and stuff knowledge from a source set with available annotations.
COCO-Stuff: Thing and Stuff Classes in Context
To understand stuff and things in context we introduce COCO-Stuff, which augments all 164K images of the COCO 2017 dataset with pixel-wise annotations for 91 stuff classes.
 Ranked #1 on
Semantic Segmentation
on COCO-Stuff
Ranked #1 on
Semantic Segmentation
on COCO-Stuff
Learning Semantic Part-Based Models from Google Images
We evaluate our models on the challenging PASCAL-Part dataset [1] and show how their performance increases at every step of the learning, with the final models more than doubling the performance of directly training from images retrieved by querying for part names (from 12. 9 to 27. 2 AP).
Weakly Supervised Object Localization Using Size Estimates
We present a technique for weakly supervised object localization (WSOL), building on the observation that WSOL algorithms usually work better on images with bigger objects.
Region-based semantic segmentation with end-to-end training
We propose a novel method for semantic segmentation, the task of labeling each pixel in an image with a semantic class.
 Ranked #1 on
Semantic Segmentation
on SIFT-flow
Ranked #1 on
Semantic Segmentation
on SIFT-flow
Do semantic parts emerge in Convolutional Neural Networks?
We also investigate the other direction: we determine which semantic parts are the most discriminative and whether they correspond to those parts emerging in the network.

End-to-end training of object class detectors for mean average precision
We present a method for training CNN-based object class detectors directly using mean average precision (mAP) as the training loss, in a truly end-to-end fashion that includes non-maximum suppression (NMS) at training time.
Discovering the Physical Parts of an Articulated Object Class From Multiple Videos
We propose a motion-based method to discover the physical parts of an articulated object class (e. g. head/torso/leg of a horse) from multiple videos.
We don't need no bounding-boxes: Training object class detectors using only human verification
Training object class detectors typically requires a large set of images in which objects are annotated by bounding-boxes.
Behavior Discovery and Alignment of Articulated Object Classes from Unstructured Video
On behavior discovery, we outperform the state-of-the-art Improved DTF descriptor.
Automatically selecting inference algorithms for discrete energy minimisation
Minimisation of discrete energies defined over factors is an important problem in computer vision, and a vast number of MAP inference algorithms have been proposed.
Joint Calibration for Semantic Segmentation
Semantic segmentation is the task of assigning a class-label to each pixel in an image.
Ranked #2 on
Semantic Segmentation
on SIFT-flow
What's the Point: Semantic Segmentation with Point Supervision
The semantic image segmentation task presents a trade-off between test time accuracy and training-time annotation cost.
Situational Object Boundary Detection
Intuitively, the appearance of true object boundaries varies from image to image.
Context Forest for efficient object detection with large mixture models
We present Context Forest (ConF), a technique for predicting properties of the objects in an image based on its global appearance.
Joint calibration of Ensemble of Exemplar SVMs
We formulate joint calibration as a constrained optimization problem and devise an efficient optimization algorithm to find its global optimum.
Object localization in ImageNet by looking out of the window
We propose a method for annotating the location of objects in ImageNet.
Analysing domain shift factors between videos and images for object detection
Object detection is one of the most important challenges in computer vision.
An active search strategy for efficient object class detection
First, we exploit context as the statistical relation between the appearance of a window and its location relative to the object, as observed in the training set.
Recovering Spatiotemporal Correspondence between Deformable Objects by Exploiting Consistent Foreground Motion in Video
Given unstructured videos of deformable objects, we automatically recover spatiotemporal correspondences to map one object to another (such as animals in the wild).
Articulated motion discovery using pairs of trajectories
We propose an unsupervised approach for discovering characteristic motion patterns in videos of highly articulated objects performing natural, unscripted behaviors, such as tigers in the wild.
Closed-Form Training of Conditional Random Fields for Large Scale Image Segmentation
It is inspired by existing closed-form expressions for the maximum likelihood parameters of a generative graphical model with tree topology.
Associative embeddings for large-scale knowledge transfer with self-assessment
By transferring knowledge from the images that have bounding-box annotations to the others, our method is capable of automatically populating ImageNet with many more bounding-boxes and even pixel-level segmentations.
Fast Energy Minimization Using Learned State Filters
However, when the graph is fully connected and the pairwise potentials are arbitrary, the complexity of even approximate minimization algorithms such as TRW-S grows quadratically both in the number of nodes and in the number of states a node can take.
Searching for objects driven by context
The dominant visual search paradigm for object class detection is sliding windows.
Exploiting spatial overlap to efficiently compute appearance distances between image windows
We present a computationally efficient technique to compute the distance of high-dimensional appearance descriptor vectors between image windows.
Who’s Doing What: Joint Modeling of Names and Verbs for Simultaneous Face and Pose Annotation
Given a corpus of news items consisting of images accompanied by text captions, we want to find out ``whos doing what, i. e. associate names and action verbs in the captions to the face and body pose of the persons in the images.
