3D-PhysNet: Learning the Intuitive Physics of Non-Rigid Object Deformations
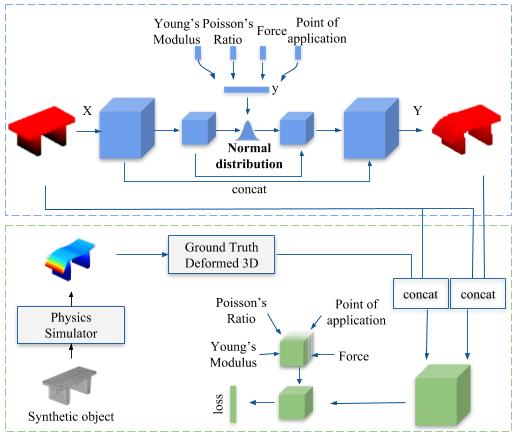
The ability to interact and understand the environment is a fundamental prerequisite for a wide range of applications from robotics to augmented reality. In particular, predicting how deformable objects will react to applied forces in real time is a significant challenge. This is further confounded by the fact that shape information about encountered objects in the real world is often impaired by occlusions, noise and missing regions e.g. a robot manipulating an object will only be able to observe a partial view of the entire solid. In this work we present a framework, 3D-PhysNet, which is able to predict how a three-dimensional solid will deform under an applied force using intuitive physics modelling. In particular, we propose a new method to encode the physical properties of the material and the applied force, enabling generalisation over materials. The key is to combine deep variational autoencoders with adversarial training, conditioned on the applied force and the material properties. We further propose a cascaded architecture that takes a single 2.5D depth view of the object and predicts its deformation. Training data is provided by a physics simulator. The network is fast enough to be used in real-time applications from partial views. Experimental results show the viability and the generalisation properties of the proposed architecture.
PDF Abstract
