A Single Stream Network for Robust and Real-time RGB-D Salient Object Detection
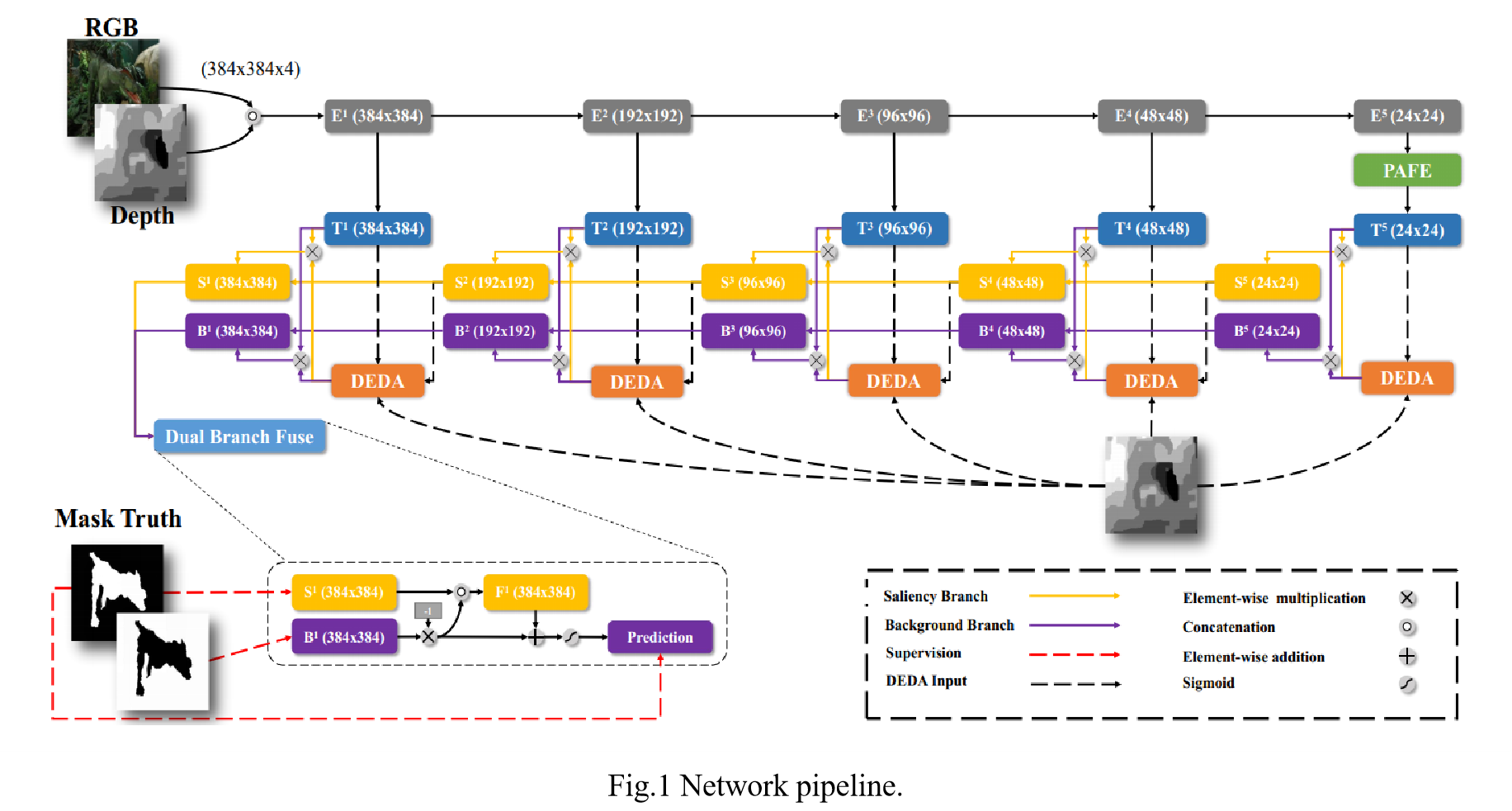
Existing RGB-D salient object detection (SOD) approaches concentrate on the cross-modal fusion between the RGB stream and the depth stream. They do not deeply explore the effect of the depth map itself. In this work, we design a single stream network to directly use the depth map to guide early fusion and middle fusion between RGB and depth, which saves the feature encoder of the depth stream and achieves a lightweight and real-time model. We tactfully utilize depth information from two perspectives: (1) Overcoming the incompatibility problem caused by the great difference between modalities, we build a single stream encoder to achieve the early fusion, which can take full advantage of ImageNet pre-trained backbone model to extract rich and discriminative features. (2) We design a novel depth-enhanced dual attention module (DEDA) to efficiently provide the fore-/back-ground branches with the spatially filtered features, which enables the decoder to optimally perform the middle fusion. Besides, we put forward a pyramidally attended feature extraction module (PAFE) to accurately localize the objects of different scales. Extensive experiments demonstrate that the proposed model performs favorably against most state-of-the-art methods under different evaluation metrics. Furthermore, this model is 55.5\% lighter than the current lightest model and runs at a real-time speed of 32 FPS when processing a $384 \times 384$ image.
PDF Abstract ECCV 2020 PDF ECCV 2020 Abstract



 NLPR
NLPR
 NJU2K
NJU2K

