Cascading Feature Extraction for Fast Point Cloud Registration
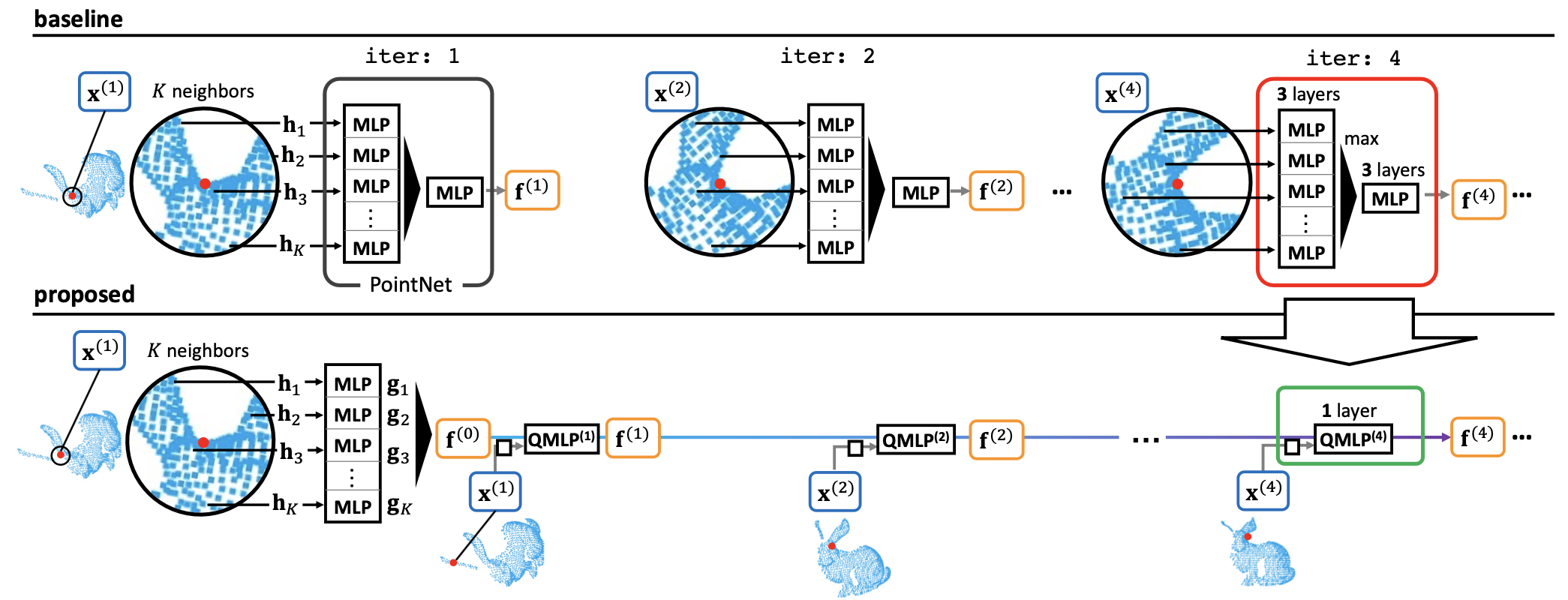
We propose a method for speeding up a 3D point cloud registration through a cascading feature extraction. The current approach with the highest accuracy is realized by iteratively executing feature extraction and registration using deep features. However, iterative feature extraction takes time. Our proposed method significantly reduces the computational cost using cascading shallow layers. Our idea is to omit redundant computations that do not always contribute to the final accuracy. The proposed approach is approximately three times faster than the existing methods without a loss of accuracy.
PDF Abstract

Datasets
 ModelNet
ModelNet
Results from the Paper
Submit
results from this paper
to get state-of-the-art GitHub badges and help the
community compare results to other papers.
Methods
No methods listed for this paper. Add
relevant methods here
