IterDet: Iterative Scheme for Object Detection in Crowded Environments
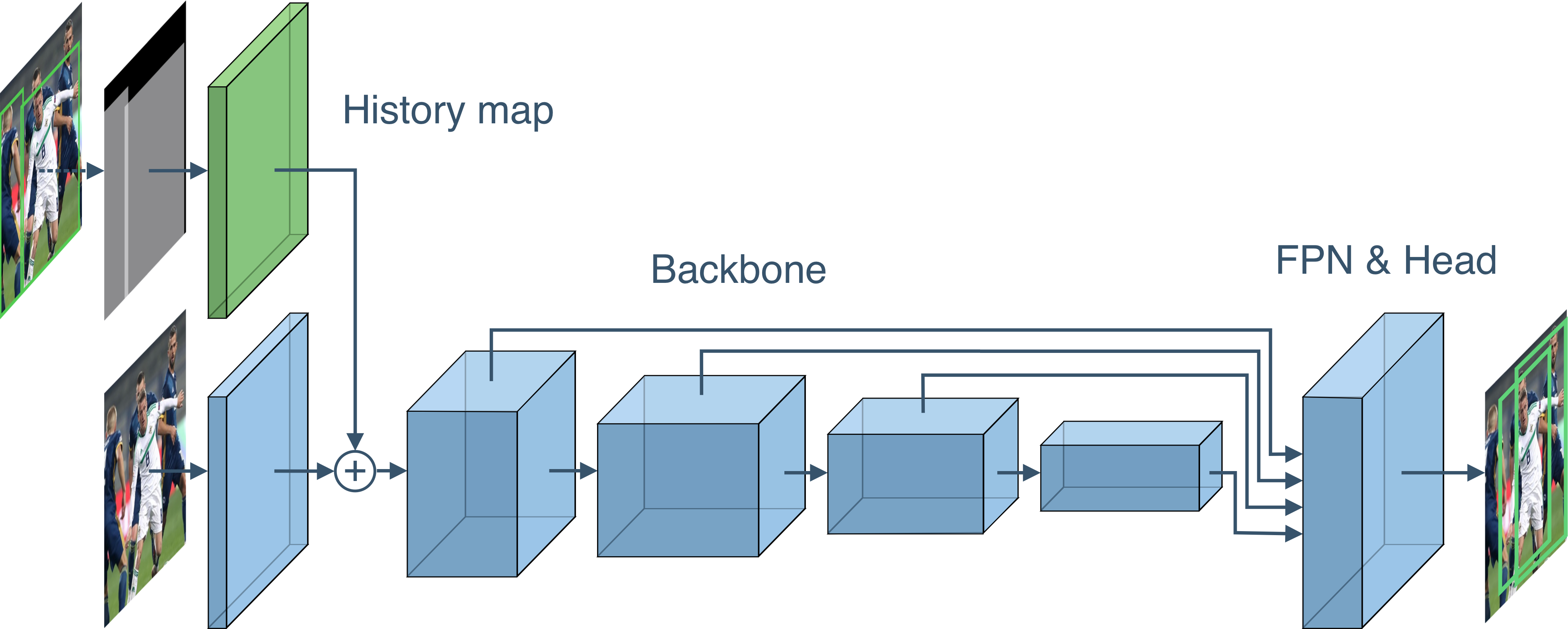
Deep learning-based detectors usually produce a redundant set of object bounding boxes including many duplicate detections of the same object. These boxes are then filtered using non-maximum suppression (NMS) in order to select exactly one bounding box per object of interest. This greedy scheme is simple and provides sufficient accuracy for isolated objects but often fails in crowded environments, since one needs to both preserve boxes for different objects and suppress duplicate detections. In this work we develop an alternative iterative scheme, where a new subset of objects is detected at each iteration. Detected boxes from the previous iterations are passed to the network at the following iterations to ensure that the same object would not be detected twice. This iterative scheme can be applied to both one-stage and two-stage object detectors with just minor modifications of the training and inference procedures. We perform extensive experiments with two different baseline detectors on four datasets and show significant improvement over the baseline, leading to state-of-the-art performance on CrowdHuman and WiderPerson datasets. The source code and the trained models are available at https://github.com/saic-vul/iterdet.
PDF Abstract


 CrowdHuman
CrowdHuman
 WiderPerson
WiderPerson

