Learning Semantic Ambiguities for Zero-Shot Learning
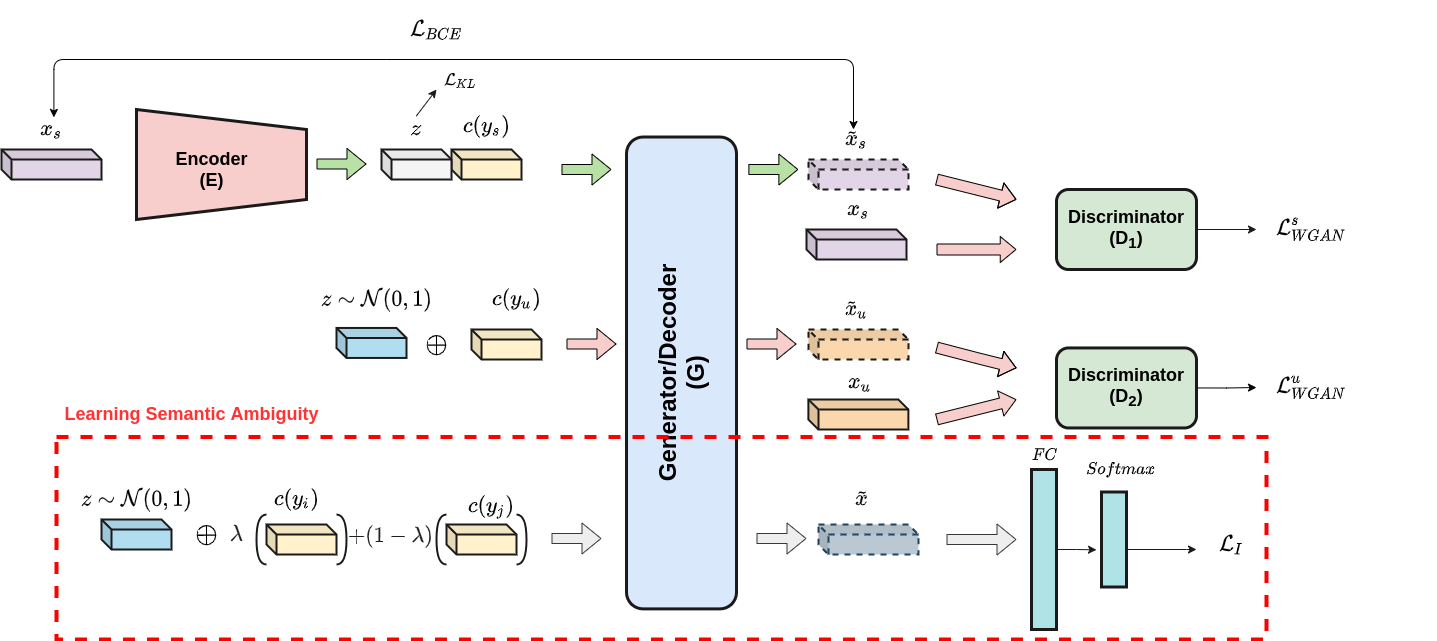
Zero-shot learning (ZSL) aims at recognizing classes for which no visual sample is available at training time. To address this issue, one can rely on a semantic description of each class. A typical ZSL model learns a mapping between the visual samples of seen classes and the corresponding semantic descriptions, in order to do the same on unseen classes at test time. State of the art approaches rely on generative models that synthesize visual features from the prototype of a class, such that a classifier can then be learned in a supervised manner. However, these approaches are usually biased towards seen classes whose visual instances are the only one that can be matched to a given class prototype. We propose a regularization method that can be applied to any conditional generative-based ZSL method, by leveraging only the semantic class prototypes. It learns to synthesize discriminative features for possible semantic description that are not available at training time, that is the unseen ones. The approach is evaluated for ZSL and GZSL on four datasets commonly used in the literature, either in inductive and transductive settings, with results on-par or above state of the art approaches.
PDF Abstract

