NeuroGF: A Neural Representation for Fast Geodesic Distance and Path Queries
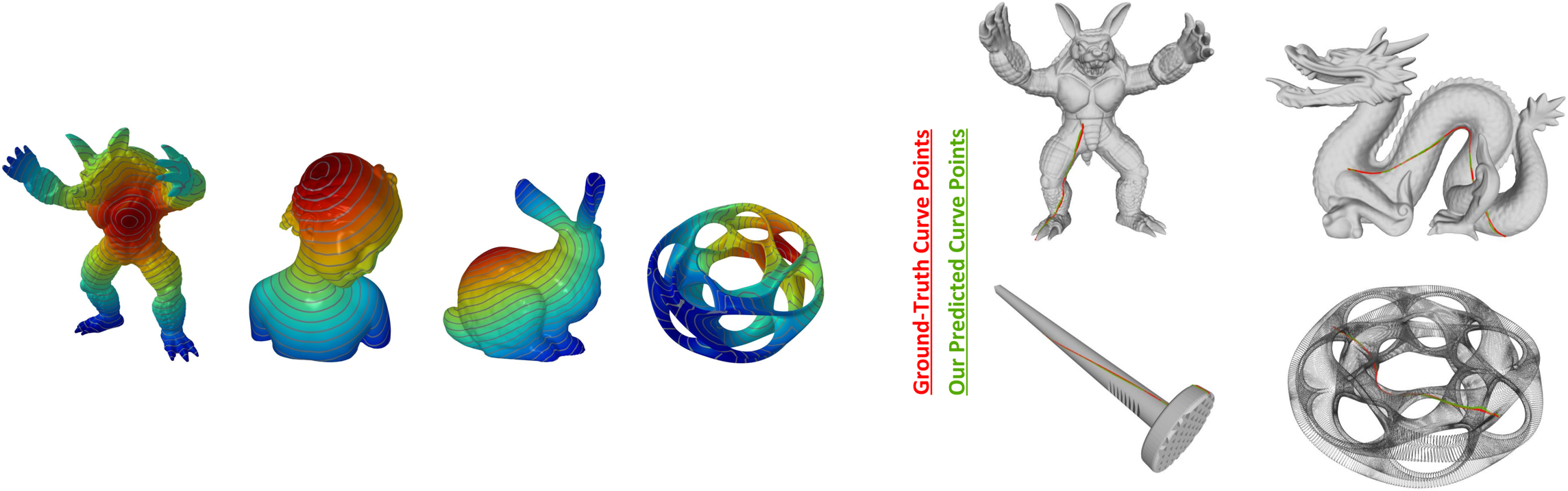
Geodesics are essential in many geometry processing applications. However, traditional algorithms for computing geodesic distances and paths on 3D mesh models are often inefficient and slow. This makes them impractical for scenarios that require extensive querying of arbitrary point-to-point geodesics. Although neural implicit representations have emerged as a popular way of representing 3D shape geometries, there is still no research on representing geodesics with deep implicit functions. To bridge this gap, this paper presents the first attempt to represent geodesics on 3D mesh models using neural implicit functions. Specifically, we introduce neural geodesic fields (NeuroGFs), which are learned to represent the all-pairs geodesics of a given mesh. By using NeuroGFs, we can efficiently and accurately answer queries of arbitrary point-to-point geodesic distances and paths, overcoming the limitations of traditional algorithms. Evaluations on common 3D models show that NeuroGFs exhibit exceptional performance in solving the single-source all-destination (SSAD) and point-to-point geodesics, and achieve high accuracy consistently. Besides, NeuroGFs also offer the unique advantage of encoding both 3D geometry and geodesics in a unified representation. Moreover, we further extend generalizable learning frameworks of NeuroGFs by adding shape feature encoders, which also show satisfactory performances for unseen shapes and categories. Code is made available at https://github.com/keeganhk/NeuroGF/tree/master.
PDF Abstract NeurIPS 2023 PDF NeurIPS 2023 Abstract
