PartManip: Learning Cross-Category Generalizable Part Manipulation Policy from Point Cloud Observations
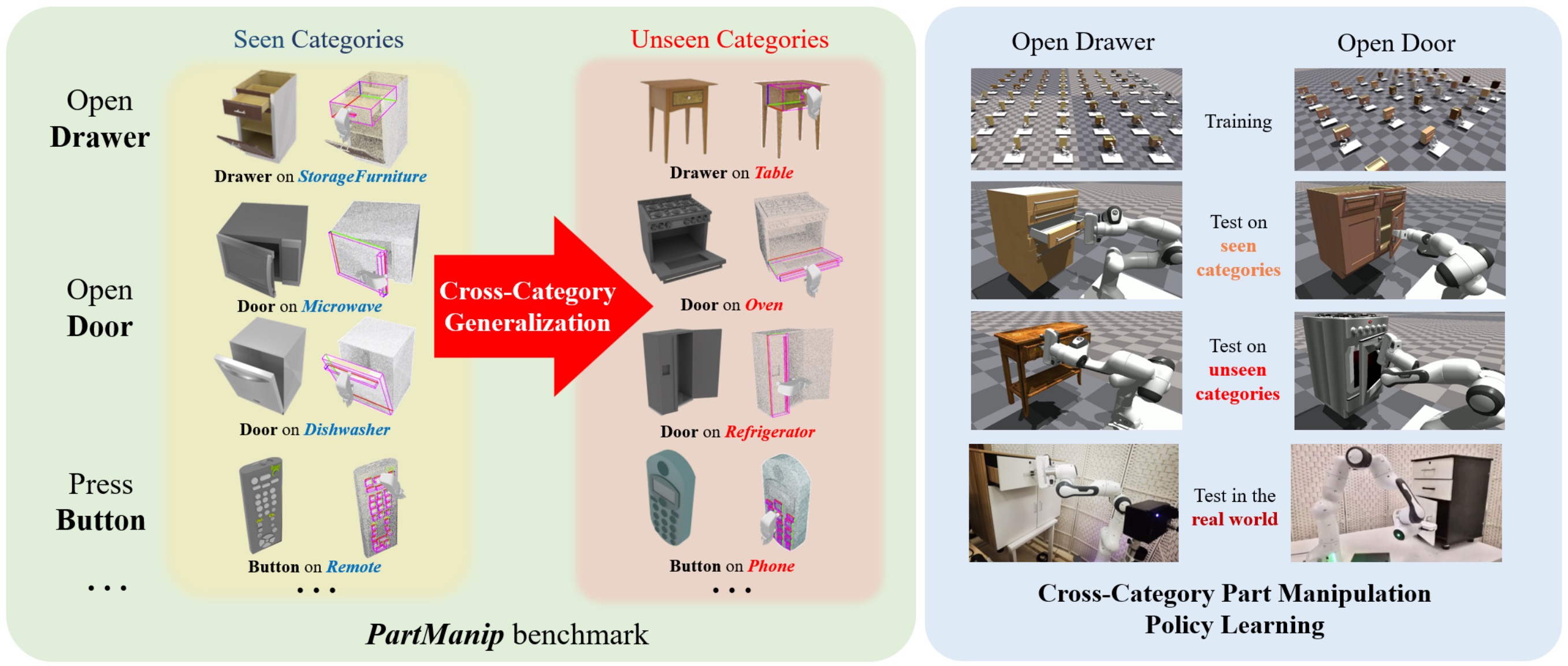
Learning a generalizable object manipulation policy is vital for an embodied agent to work in complex real-world scenes. Parts, as the shared components in different object categories, have the potential to increase the generalization ability of the manipulation policy and achieve cross-category object manipulation. In this work, we build the first large-scale, part-based cross-category object manipulation benchmark, PartManip, which is composed of 11 object categories, 494 objects, and 1432 tasks in 6 task classes. Compared to previous work, our benchmark is also more diverse and realistic, i.e., having more objects and using sparse-view point cloud as input without oracle information like part segmentation. To tackle the difficulties of vision-based policy learning, we first train a state-based expert with our proposed part-based canonicalization and part-aware rewards, and then distill the knowledge to a vision-based student. We also find an expressive backbone is essential to overcome the large diversity of different objects. For cross-category generalization, we introduce domain adversarial learning for domain-invariant feature extraction. Extensive experiments in simulation show that our learned policy can outperform other methods by a large margin, especially on unseen object categories. We also demonstrate our method can successfully manipulate novel objects in the real world.
PDF Abstract CVPR 2023 PDF CVPR 2023 Abstract

 ManiSkill
ManiSkill
