Point Cloud Upsampling via Disentangled Refinement
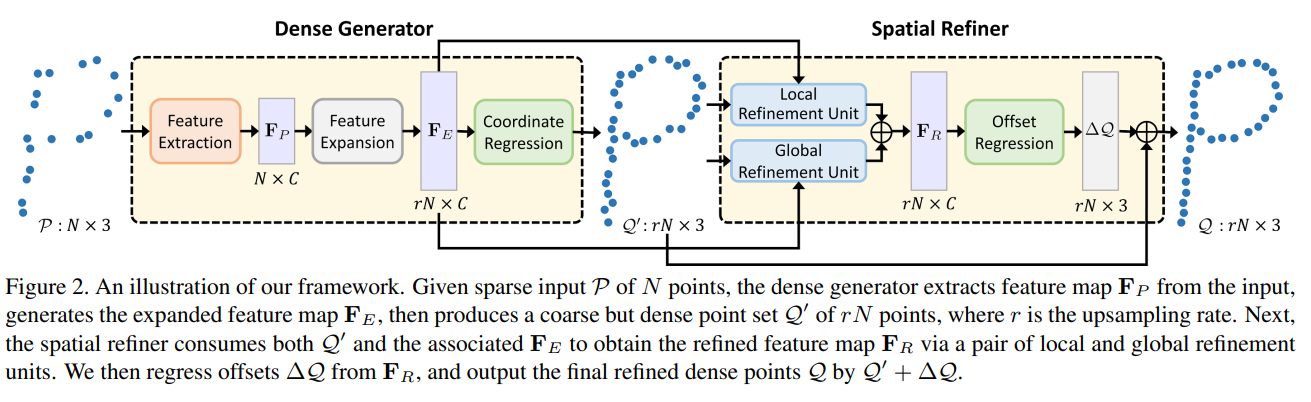
Point clouds produced by 3D scanning are often sparse, non-uniform, and noisy. Recent upsampling approaches aim to generate a dense point set, while achieving both distribution uniformity and proximity-to-surface, and possibly amending small holes, all in a single network. After revisiting the task, we propose to disentangle the task based on its multi-objective nature and formulate two cascaded sub-networks, a dense generator and a spatial refiner. The dense generator infers a coarse but dense output that roughly describes the underlying surface, while the spatial refiner further fine-tunes the coarse output by adjusting the location of each point. Specifically, we design a pair of local and global refinement units in the spatial refiner to evolve a coarse feature map. Also, in the spatial refiner, we regress a per-point offset vector to further adjust the coarse outputs in fine-scale. Extensive qualitative and quantitative results on both synthetic and real-scanned datasets demonstrate the superiority of our method over the state-of-the-arts.
PDF Abstract CVPR 2021 PDF CVPR 2021 Abstract


 ScanObjectNN
ScanObjectNN
