PreTraM: Self-Supervised Pre-training via Connecting Trajectory and Map
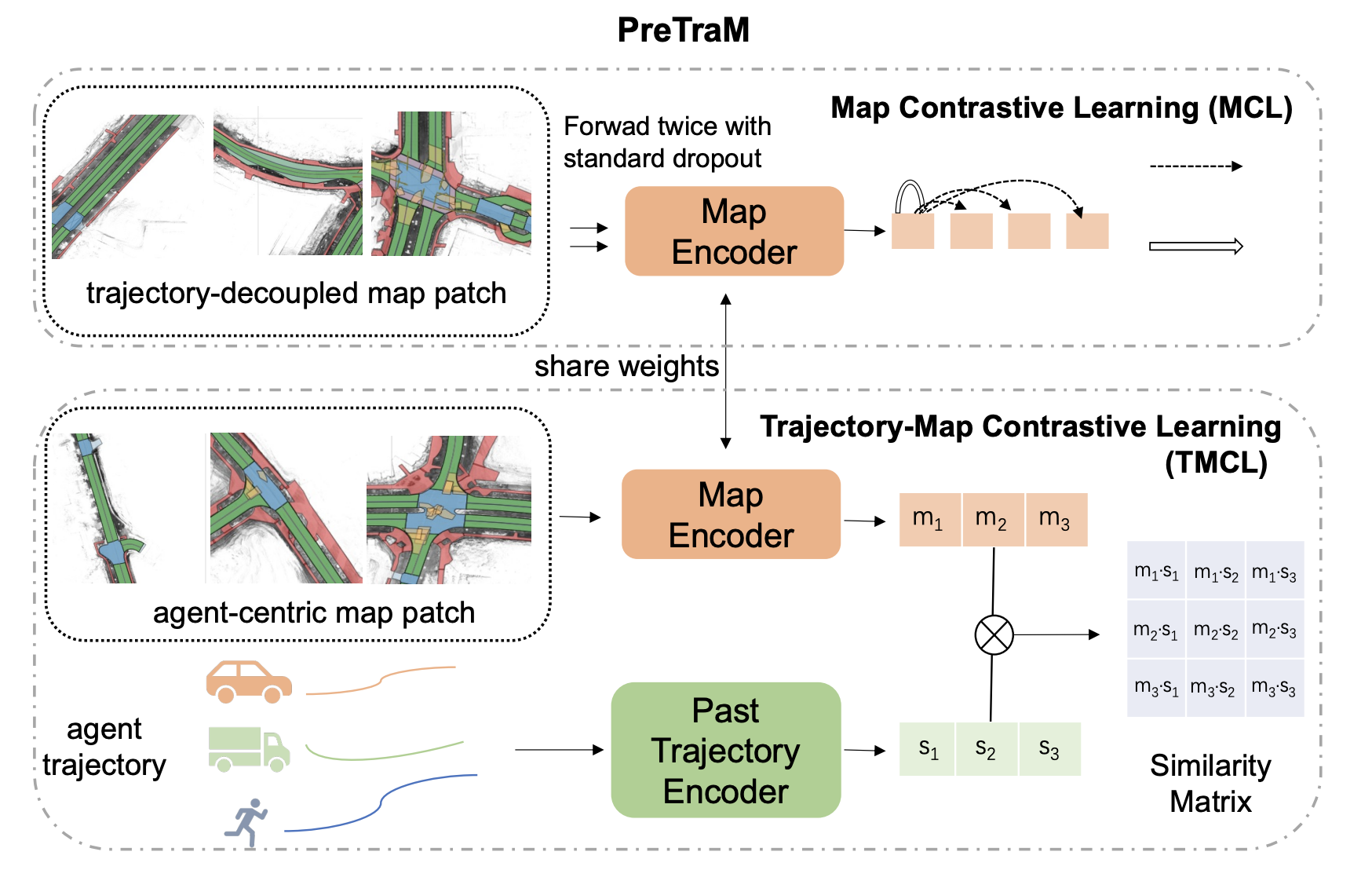
Deep learning has recently achieved significant progress in trajectory forecasting. However, the scarcity of trajectory data inhibits the data-hungry deep-learning models from learning good representations. While mature representation learning methods exist in computer vision and natural language processing, these pre-training methods require large-scale data. It is hard to replicate these approaches in trajectory forecasting due to the lack of adequate trajectory data (e.g., 34K samples in the nuScenes dataset). To work around the scarcity of trajectory data, we resort to another data modality closely related to trajectories-HD-maps, which is abundantly provided in existing datasets. In this paper, we propose PreTraM, a self-supervised pre-training scheme via connecting trajectories and maps for trajectory forecasting. Specifically, PreTraM consists of two parts: 1) Trajectory-Map Contrastive Learning, where we project trajectories and maps to a shared embedding space with cross-modal contrastive learning, and 2) Map Contrastive Learning, where we enhance map representation with contrastive learning on large quantities of HD-maps. On top of popular baselines such as AgentFormer and Trajectron++, PreTraM boosts their performance by 5.5% and 6.9% relatively in FDE-10 on the challenging nuScenes dataset. We show that PreTraM improves data efficiency and scales well with model size.
PDF Abstract



 nuScenes
nuScenes
