Ranking-Based Siamese Visual Tracking
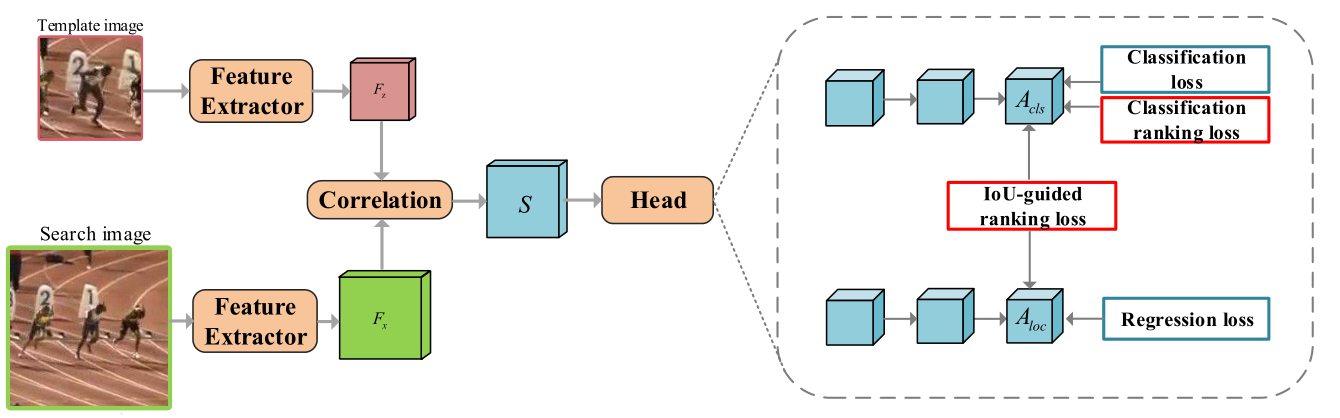
Current Siamese-based trackers mainly formulate the visual tracking into two independent subtasks, including classification and localization. They learn the classification subnetwork by processing each sample separately and neglect the relationship among positive and negative samples. Moreover, such tracking paradigm takes only the classification confidence of proposals for the final prediction, which may yield the misalignment between classification and localization. To resolve these issues, this paper proposes a ranking-based optimization algorithm to explore the relationship among different proposals. To this end, we introduce two ranking losses, including the classification one and the IoU-guided one, as optimization constraints. The classification ranking loss can ensure that positive samples rank higher than hard negative ones, i.e., distractors, so that the trackers can select the foreground samples successfully without being fooled by the distractors. The IoU-guided ranking loss aims to align classification confidence scores with the Intersection over Union(IoU) of the corresponding localization prediction for positive samples, enabling the well-localized prediction to be represented by high classification confidence. Specifically, the proposed two ranking losses are compatible with most Siamese trackers and incur no additional computation for inference. Extensive experiments on seven tracking benchmarks, including OTB100, UAV123, TC128, VOT2016, NFS30, GOT-10k and LaSOT, demonstrate the effectiveness of the proposed ranking-based optimization algorithm. The code and raw results are available at https://github.com/sansanfree/RBO.
PDF Abstract CVPR 2022 PDF CVPR 2022 Abstract


 OTB
OTB
 LaSOT
LaSOT
 GOT-10k
GOT-10k
 VOT2016
VOT2016
