Revisiting Few-Shot Object Detection with Vision-Language Models
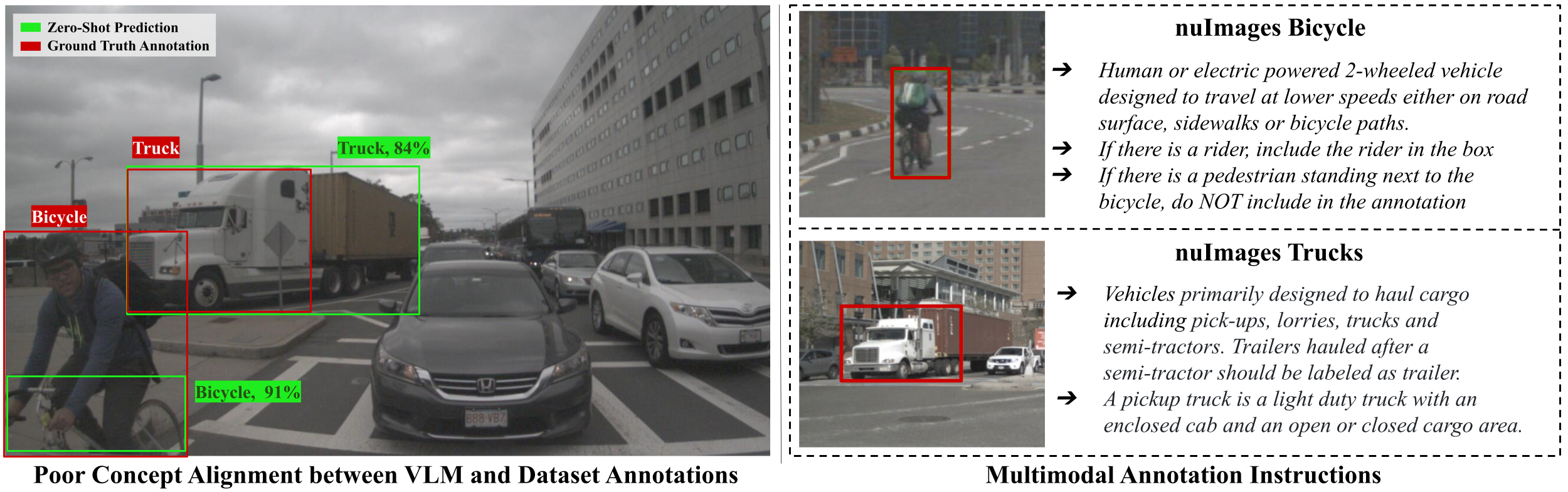
Few-shot object detection (FSOD) benchmarks have advanced techniques for detecting new categories with limited annotations. Existing benchmarks repurpose well-established datasets like COCO by partitioning categories into base and novel classes for pre-training and fine-tuning respectively. However, these benchmarks do not reflect how FSOD is deployed in practice. Rather than only pre-training on a small number of base categories, we argue that it is more practical to fine-tune a foundation model (e.g., a vision-language model (VLM) pre-trained on web-scale data) for a target domain. Surprisingly, we find that zero-shot inference from VLMs like GroundingDINO significantly outperforms the state-of-the-art (48.3 vs. 33.1 AP) on COCO. However, such zero-shot models can still be misaligned to target concepts of interest. For example, trailers on the web may be different from trailers in the context of autonomous vehicles. In this work, we propose Foundational FSOD, a new benchmark protocol that evaluates detectors pre-trained on any external datasets and fine-tuned on K-shots per target class. Further, we note that current FSOD benchmarks are actually federated datasets containing exhaustive annotations for each category on a subset of the data. We leverage this insight to propose simple strategies for fine-tuning VLMs with federated losses. We demonstrate the effectiveness of our approach on LVIS and nuImages, improving over prior work by 5.9 AP. Our code is available at https://github.com/anishmadan23/foundational_fsod
PDF Abstract





 nuScenes
nuScenes
 LVIS
LVIS
