Trajectory Forecasting on Temporal Graphs
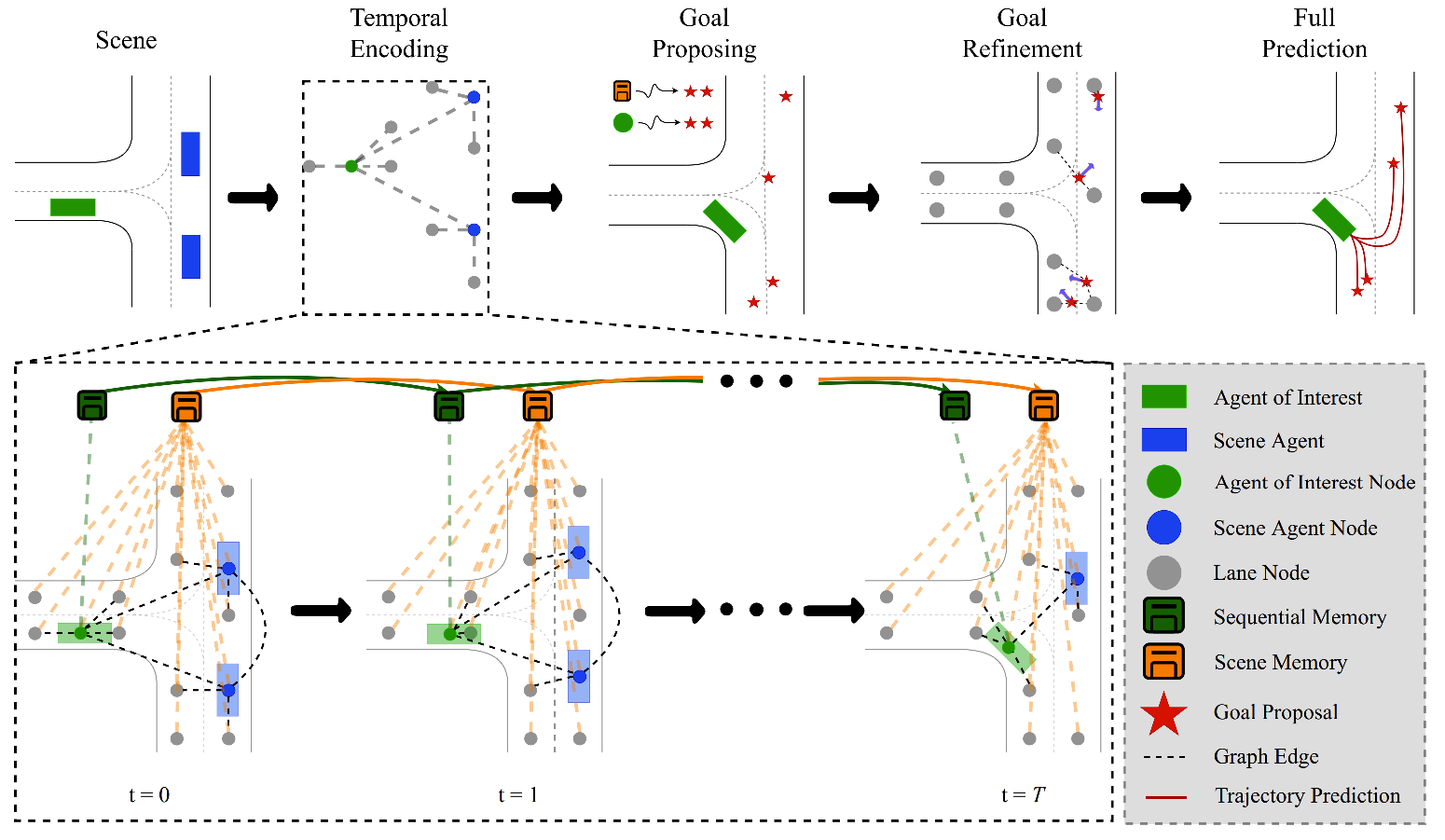
Predicting future locations of agents in the scene is an important problem in self-driving. In recent years, there has been a significant progress in representing the scene and the agents in it. The interactions of agents with the scene and with each other are typically modeled with a Graph Neural Network. However, the graph structure is mostly static and fails to represent the temporal changes in highly dynamic scenes. In this work, we propose a temporal graph representation to better capture the dynamics in traffic scenes. We complement our representation with two types of memory modules; one focusing on the agent of interest and the other on the entire scene. This allows us to learn temporally-aware representations that can achieve good results even with simple regression of multiple futures. When combined with goal-conditioned prediction, we show better results that can reach the state-of-the-art performance on the Argoverse benchmark.
PDF Abstract


Datasets
 Argoverse
Argoverse

| Task | Dataset | Model | Metric Name | Metric Value | Global Rank | Benchmark |
|---|---|---|---|---|---|---|
| Motion Forecasting | Argoverse CVPR 2020 | FTGN | MR (K=6) | 0.1528 | # 212 | |
| minADE (K=1) | 1.7716 | # 177 | ||||
| minFDE (K=1) | 3.9031 | # 172 | ||||
| MR (K=1) | 0.5984 | # 184 | ||||
| minADE (K=6) | 0.8607 | # 225 | ||||
| minFDE (K=6) | 1.3055 | # 231 | ||||
| DAC (K=6) | 0.9837 | # 107 | ||||
| brier-minFDE (K=6) | 1.9285 | # 51 |
