Value Iteration Networks
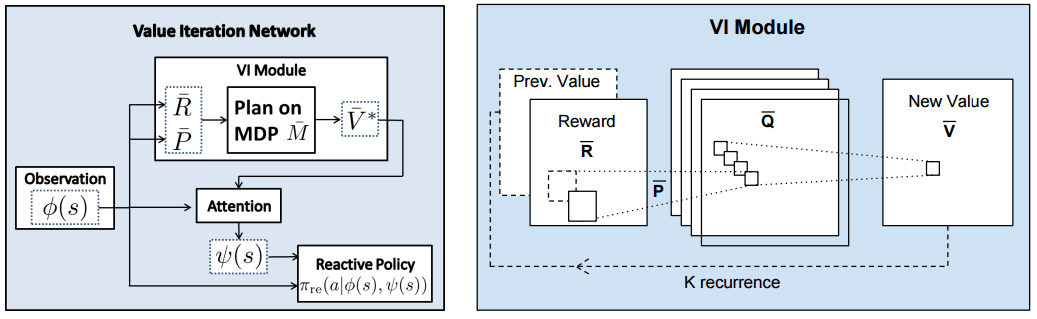
We introduce the value iteration network (VIN): a fully differentiable neural network with a `planning module' embedded within. VINs can learn to plan, and are suitable for predicting outcomes that involve planning-based reasoning, such as policies for reinforcement learning. Key to our approach is a novel differentiable approximation of the value-iteration algorithm, which can be represented as a convolutional neural network, and trained end-to-end using standard backpropagation. We evaluate VIN based policies on discrete and continuous path-planning domains, and on a natural-language based search task. We show that by learning an explicit planning computation, VIN policies generalize better to new, unseen domains.
PDF Abstract NeurIPS 2016 PDF NeurIPS 2016 AbstractCode



Datasets
Add Datasets
introduced or used in this paper
Results from the Paper
Submit
results from this paper
to get state-of-the-art GitHub badges and help the
community compare results to other papers.
Methods
No methods listed for this paper. Add
relevant methods here
