Vision-and-Language Navigation: Interpreting visually-grounded navigation instructions in real environments
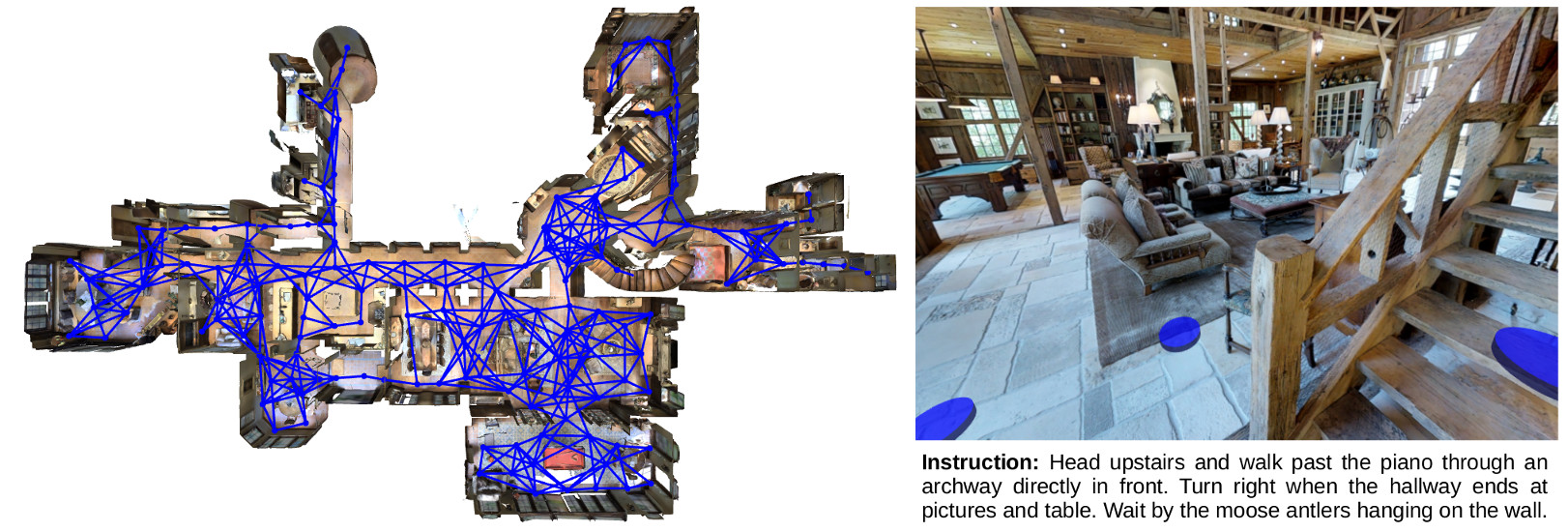
A robot that can carry out a natural-language instruction has been a dream since before the Jetsons cartoon series imagined a life of leisure mediated by a fleet of attentive robot helpers. It is a dream that remains stubbornly distant. However, recent advances in vision and language methods have made incredible progress in closely related areas. This is significant because a robot interpreting a natural-language navigation instruction on the basis of what it sees is carrying out a vision and language process that is similar to Visual Question Answering. Both tasks can be interpreted as visually grounded sequence-to-sequence translation problems, and many of the same methods are applicable. To enable and encourage the application of vision and language methods to the problem of interpreting visually-grounded navigation instructions, we present the Matterport3D Simulator -- a large-scale reinforcement learning environment based on real imagery. Using this simulator, which can in future support a range of embodied vision and language tasks, we provide the first benchmark dataset for visually-grounded natural language navigation in real buildings -- the Room-to-Room (R2R) dataset.
PDF Abstract CVPR 2018 PDF CVPR 2018 Abstract



 R2R
R2R
 Visual Question Answering
Visual Question Answering
 Matterport3D
Matterport3D

