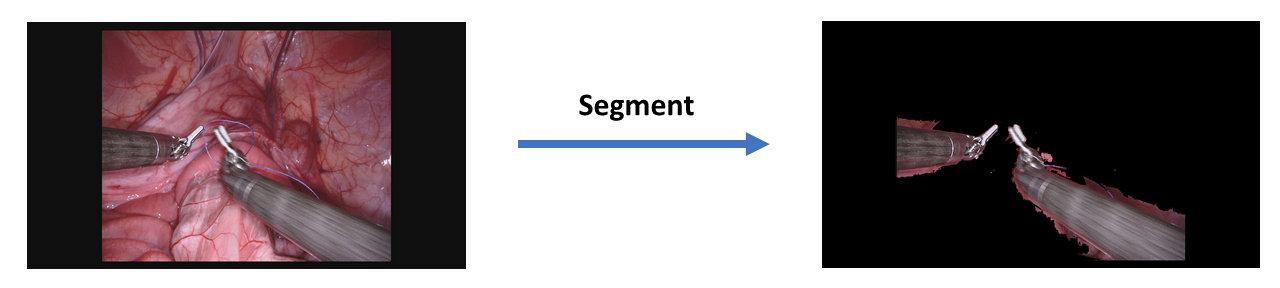
2017 Robotic Instrument Segmentation Challenge
In mainstream computer vision and machine learning, public datasets such as ImageNet, COCO and KITTI have helped drive enormous improvements by enabling researchers to understand the strengths and limitations of different algorithms via performance comparison. However, this type of approach has had limited translation to problems in robotic assisted surgery as this field has never established the same level of common datasets and benchmarking methods. In 2015 a sub-challenge was introduced at the EndoVis workshop where a set of robotic images were provided with automatically generated annotations from robot forward kinematics. However, there were issues with this dataset due to the limited background variation, lack of complex motion and inaccuracies in the annotation. In this work we present the results of the 2017 challenge on robotic instrument segmentation which involved 10 teams participating in binary, parts and type based segmentation of articulated da Vinci robotic instruments.
PDF AbstractCode



Datasets
Introduced in the Paper:
 2017 Robotic Instrument Segmentation Challenge
2017 Robotic Instrument Segmentation Challenge
Used in the Paper:
 ImageNet
ImageNet
 MS COCO
MS COCO
