3D_DEN: Open-ended 3D Object Recognition using Dynamically Expandable Networks
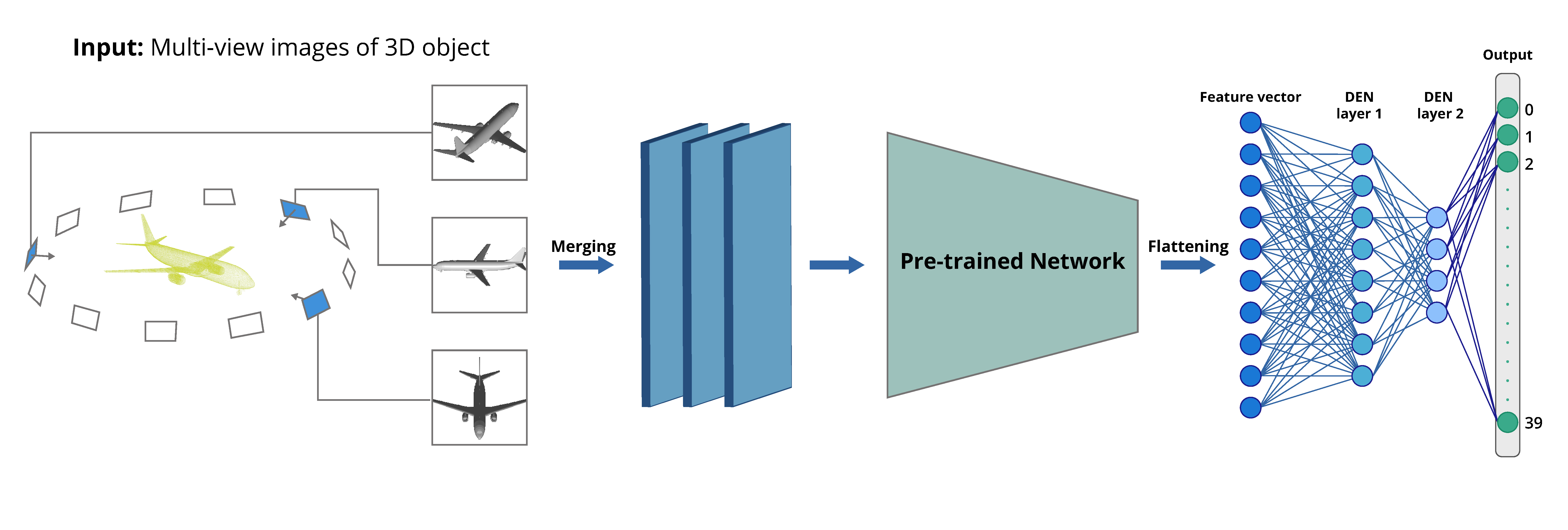
Service robots, in general, have to work independently and adapt to the dynamic changes happening in the environment in real-time. One important aspect in such scenarios is to continually learn to recognize newer object categories when they become available. This combines two main research problems namely continual learning and 3D object recognition. Most of the existing research approaches include the use of deep Convolutional Neural Networks (CNNs) focusing on image datasets. A modified approach might be needed for continually learning 3D object categories. A major concern in using CNNs is the problem of catastrophic forgetting when a model tries to learn a new task. Despite various proposed solutions to mitigate this problem, there still exist some downsides of such solutions, e.g., computational complexity, especially when learning substantial number of tasks. These downsides can pose major problems in robotic scenarios where real-time response plays an essential role. Towards addressing this challenge, we propose a new deep transfer learning approach based on a dynamic architectural method to make robots capable of open-ended learning about new 3D object categories. Furthermore, we make sure that the mentioned downsides are minimized to a great extent. Experimental results showed that the proposed model outperformed state-of-the-art approaches with regards to accuracy and also substantially minimizes computational overhead.
PDF Abstract





 ImageNet
ImageNet
