Adversarial Robustness through the Lens of Convolutional Filters
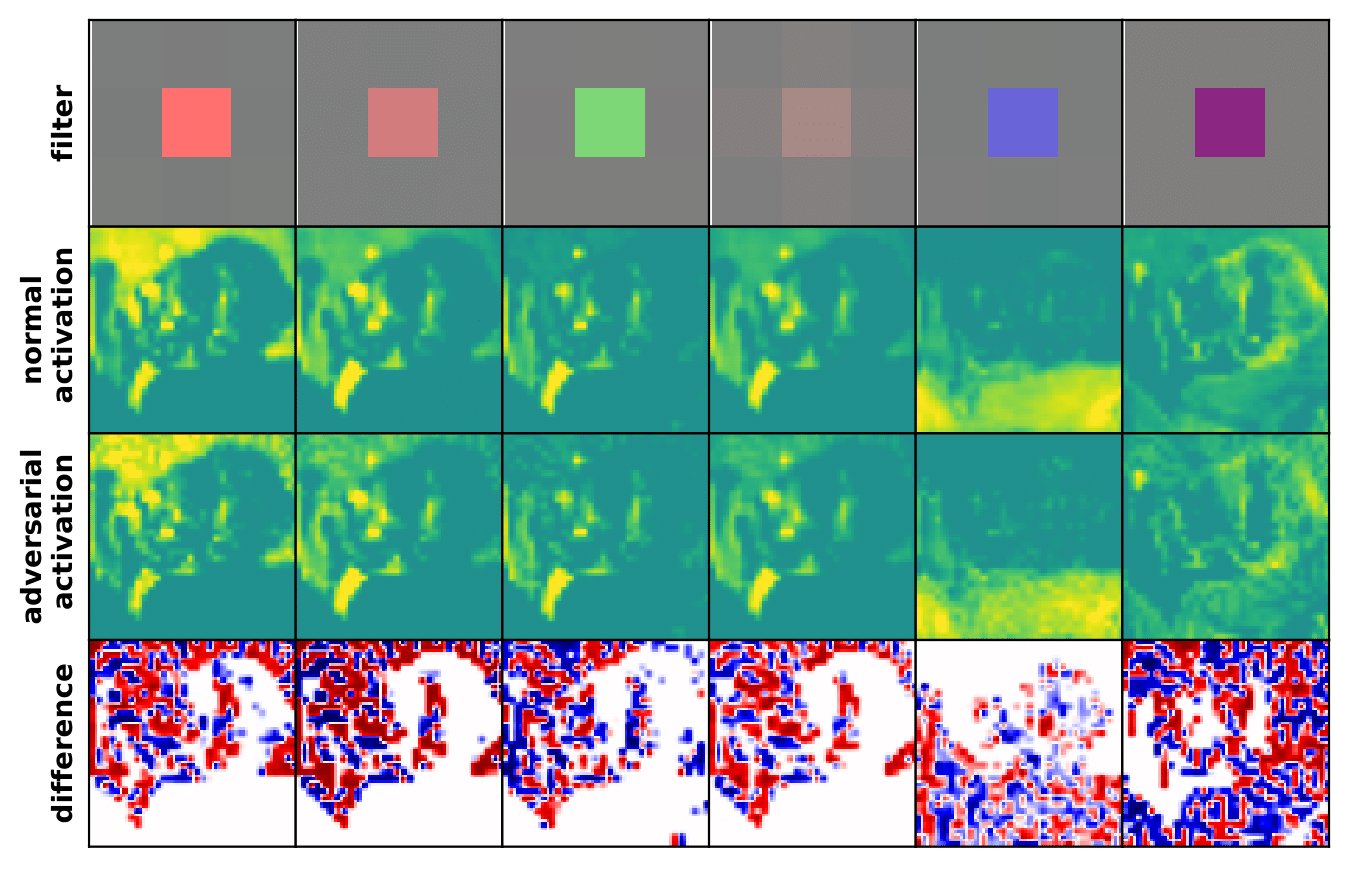
Deep learning models are intrinsically sensitive to distribution shifts in the input data. In particular, small, barely perceivable perturbations to the input data can force models to make wrong predictions with high confidence. An common defense mechanism is regularization through adversarial training which injects worst-case perturbations back into training to strengthen the decision boundaries, and to reduce overfitting. In this context, we perform an investigation of 3x3 convolution filters that form in adversarially-trained models. Filters are extracted from 71 public models of the linf-RobustBench CIFAR-10/100 and ImageNet1k leaderboard and compared to filters extracted from models built on the same architectures but trained without robust regularization. We observe that adversarially-robust models appear to form more diverse, less sparse, and more orthogonal convolution filters than their normal counterparts. The largest differences between robust and normal models are found in the deepest layers, and the very first convolution layer, which consistently and predominantly forms filters that can partially eliminate perturbations, irrespective of the architecture. Data & Project website: https://github.com/paulgavrikov/cvpr22w_RobustnessThroughTheLens
PDF Abstract

Datasets
Introduced in the Paper:
CNN Filter DB-RobustUsed in the Paper:
 CIFAR-10
CIFAR-10
 ImageNet
ImageNet
 CIFAR-100
ImageNet-1K
RobustBench
CIFAR-100
ImageNet-1K
RobustBench
 CNN Filter DB
CNN Filter DB
