
FGR: Frustum-Aware Geometric Reasoning for Weakly Supervised 3D Vehicle Detection
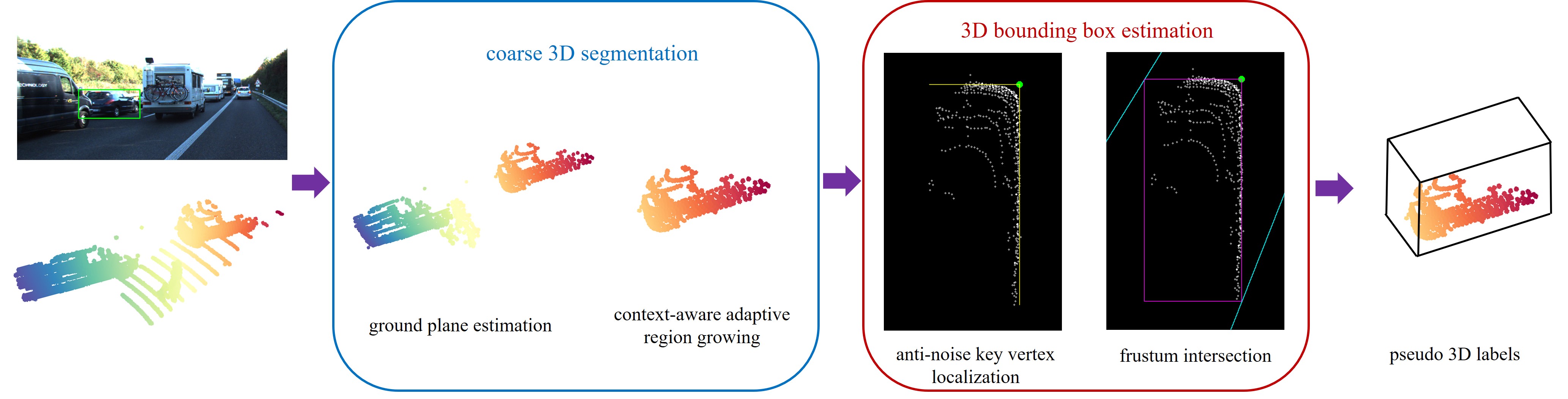
In this paper, we investigate the problem of weakly supervised 3D vehicle detection. Conventional methods for 3D object detection need vast amounts of manually labelled 3D data as supervision signals. However, annotating large datasets requires huge human efforts, especially for 3D area. To tackle this problem, we propose frustum-aware geometric reasoning (FGR) to detect vehicles in point clouds without any 3D annotations. Our method consists of two stages: coarse 3D segmentation and 3D bounding box estimation. For the first stage, a context-aware adaptive region growing algorithm is designed to segment objects based on 2D bounding boxes. Leveraging predicted segmentation masks, we develop an anti-noise approach to estimate 3D bounding boxes in the second stage. Finally 3D pseudo labels generated by our method are utilized to train a 3D detector. Independent of any 3D groundtruth, FGR reaches comparable performance with fully supervised methods on the KITTI dataset. The findings indicate that it is able to accurately detect objects in 3D space with only 2D bounding boxes and sparse point clouds.
PDF Abstract


 KITTI
KITTI
