Bayesian Floor Field: Transferring people flow predictions across environments
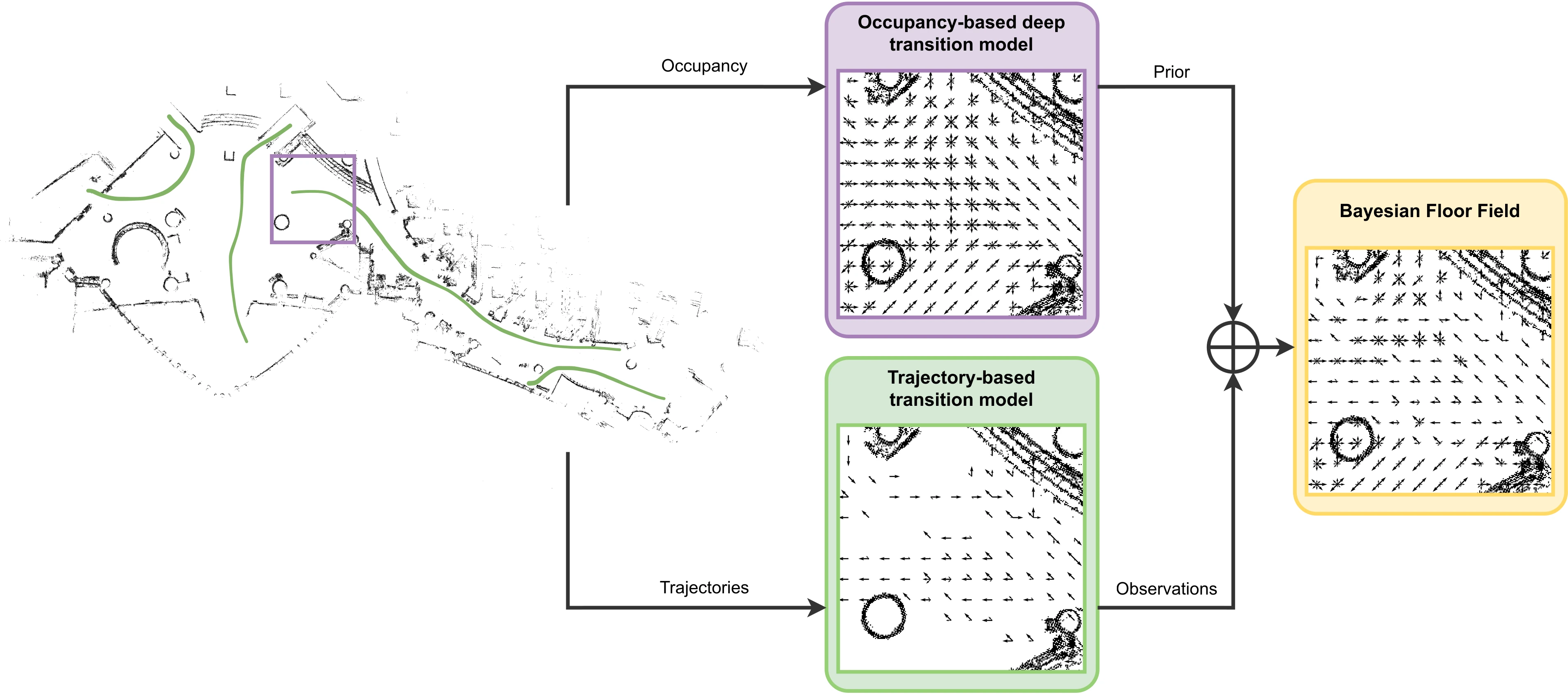
Mapping people dynamics is a crucial skill for robots, because it enables them to coexist in human-inhabited environments. However, learning a model of people dynamics is a time consuming process which requires observation of large amount of people moving in an environment. Moreover, approaches for mapping dynamics are unable to transfer the learned models across environments: each model is only able to describe the dynamics of the environment it has been built in. However, the impact of architectural geometry on people's movement can be used to anticipate their patterns of dynamics, and recent work has looked into learning maps of dynamics from occupancy. So far however, approaches based on trajectories and those based on geometry have not been combined. In this work we propose a novel Bayesian approach to learn people dynamics able to combine knowledge about the environment geometry with observations from human trajectories. An occupancy-based deep prior is used to build an initial transition model without requiring any observations of pedestrian; the model is then updated when observations become available using Bayesian inference. We demonstrate the ability of our model to increase data efficiency and to generalize across real large-scale environments, which is unprecedented for maps of dynamics.
PDF Abstract

