HD2Reg: Hierarchical Descriptors and Detectors for Point Cloud Registration
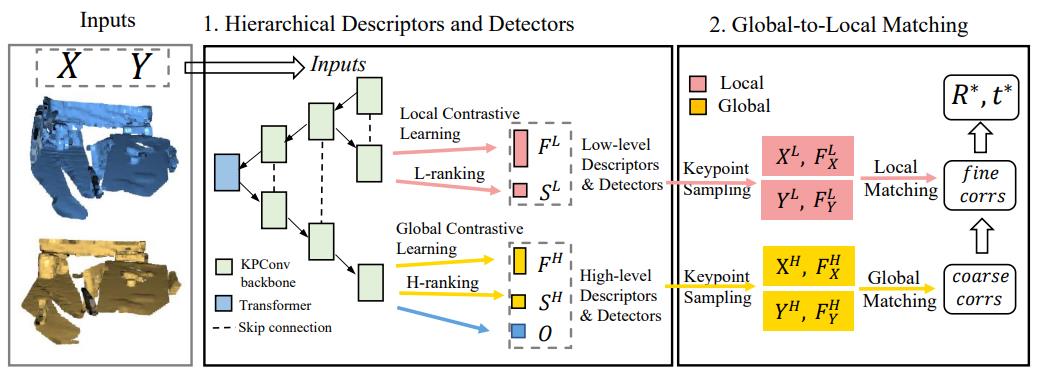
Feature Descriptors and Detectors are two main components of feature-based point cloud registration. However, little attention has been drawn to the explicit representation of local and global semantics in the learning of descriptors and detectors. In this paper, we present a framework that explicitly extracts dual-level descriptors and detectors and performs coarse-to-fine matching with them. First, to explicitly learn local and global semantics, we propose a hierarchical contrastive learning strategy, training the robust matching ability of high-level descriptors, and refining the local feature space using low-level descriptors. Furthermore, we propose to learn dual-level saliency maps that extract two groups of keypoints in two different senses. To overcome the weak supervision of binary matchability labels, we propose a ranking strategy to label the significance ranking of keypoints, and thus provide more fine-grained supervision signals. Finally, we propose a global-to-local matching scheme to obtain robust and accurate correspondences by leveraging the complementary dual-level features.Quantitative experiments on 3DMatch and KITTI odometry datasets show that our method achieves robust and accurate point cloud registration and outperforms recent keypoint-based methods.
PDF Abstract


 KITTI
KITTI
 3DMatch
3DMatch
